|
|
|
|
|
24W級スイッチングACアダプター5V4A GF24-US0540 [GF24-US0540]
通販コード M-09594 Go ForwardのスイッチングACアダプタ ■主な仕様 ・入力:AC100V~240V、50/60Hz ・出力:DC5V、0~最大4A ・出力特性:安定化出力 ・プラグ規格:外径5.5mm/内径2.1mm/センタープラス ・使用温度範囲:0~40℃ 重量(実測値): 165g 配線材 18AWG使用 VW-1 AWM 2468 E106016 |
つまみ付ジャンパーピン(赤)(2.54mmピッチ)(20個入) [2228GG-RD]
通販コード P-03888 2.54mmピッチのジャンパーピンです。ピンヘッダに差し込むことでお互いのピンを導通させます。 指でつまめるように、長めになっています。 |



 SUCCUL ACアダプター 5V 4A 大手メーカーOEM社製品 センタープラス スイッチング式 最大出力20W 出力プラグ外径5.5mm(内径2.1mm)PSE取得品 ASIN: B015RKFAA2 「日本現地法人販売、大手企業も使われているメーカーの製造品」 別途、右のジャンパーピンが必要 |
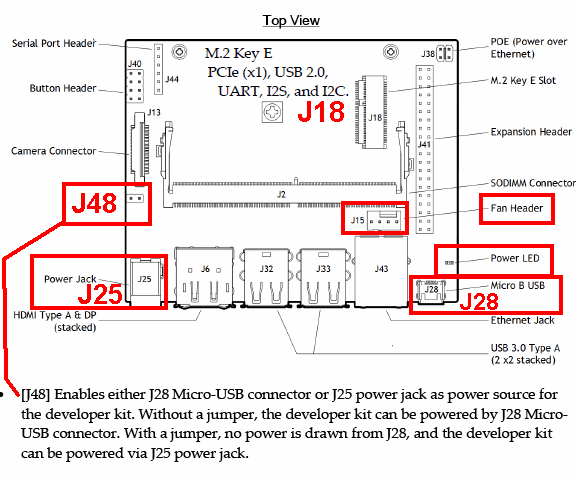
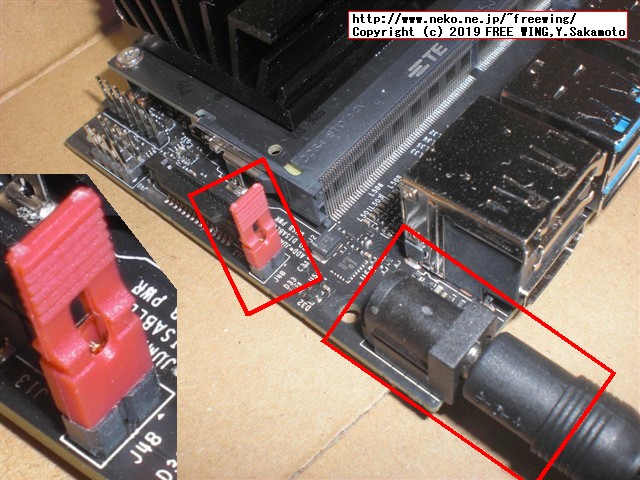
 Hommy 黒いジャンパー キャップX50 2.54mm ASIN: B074FT77QG J48に差すジャンパーピン、フルパワー動作に必要 |
 TOOGOO 40mm x 10mm 0.12A 2ピン5V DCブラシレスベアリングの冷却ファン ASIN: B06XFLV5FZ |
 FidgetGear 3ピン40mmコンピュータCPUの冷却ファンのPC 40x40x10mm DC 12Vの静かな脱熱器クーラー ASIN: B07Q8VC24K 無保証ですが、12Vのファンを 5V動作させると言う方法もあります。 |
| Raspberry Pi | DSA-13PFC-05 FCA 051250 | 5.1V 2.5A Raspberry Pi Universal Power Supply |
| Adafruit | GEO241DA-0540 | 5V 4A Switching Power Supply |
| Edimax | EW-7811Un | USB wireless networking adapter |
| Intel | 8265NGW | Dual Band Wireless-AC M.2 2230 Device |
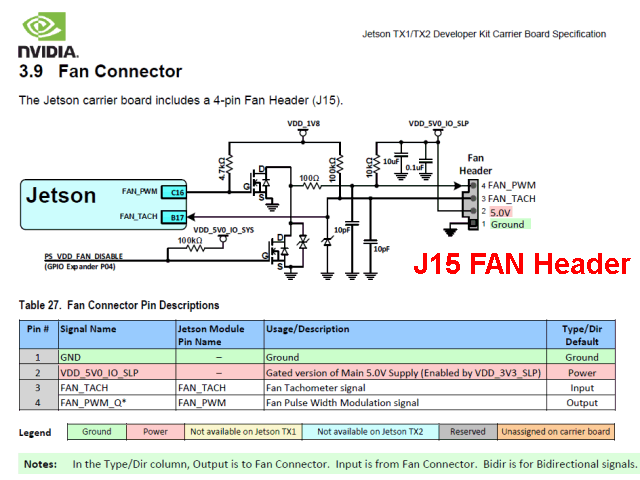
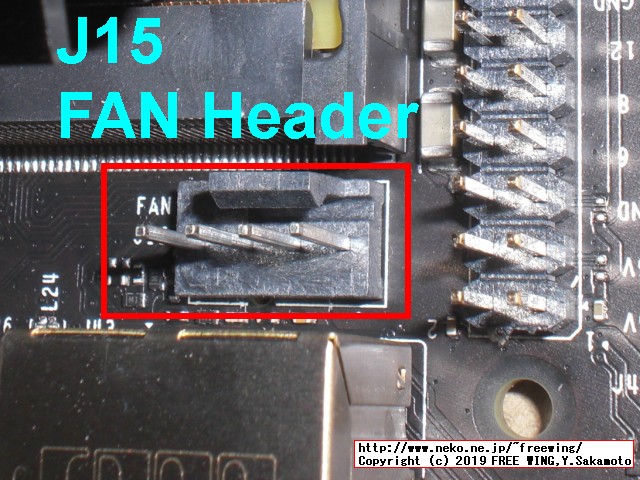
| Noctua | NF-A4x20 5V PWM | 4-pin 5V PWM fan compatible with developer kit heatsink |
 Raspberry Pi用電源セット (5V 3.0A) Pi3フル負荷検証済 ASIN: B01N8ZIJL8 5V 3.0A 直付ケーブル Physical Computing Lab |
 Wireless 802.11n USB Adapter Edimax ASIN: B003MTTJOY Edimax EW-7811Un |
 Intel Dual Band Wireless-AC 8265 ワイヤレス 802.11ac 867Mbps Dual band 2x2 WiFi + Bluetooth 4.2 カード 8265NGW ASIN: B0721MLM8B Intel 8265NGW |
 Noctua NF-A4x20 5V PWM 40mm 静音 ファン 5000rpm ASIN: B071FNHVXN Noctua NF-A4x20 5V PWM |
 Noctua NF-A4x10 5V PWMサイレントファン40 mmプレミアムブラウン/ベージュ ASIN: B07DXS86G7 Noctua NF-A4x10 5V PWM |
# Jetson Nano 冷却ファンの状態を取得 cat /sys/devices/pwm-fan/target_pwm 0 # 0なのでオフ # Jetson Nano 冷却ファンの制御 # オフ sudo sh -c 'echo 0 > /sys/devices/pwm-fan/target_pwm' # 50% sudo sh -c 'echo 128 > /sys/devices/pwm-fan/target_pwm' # 100% sudo sh -c 'echo 255 > /sys/devices/pwm-fan/target_pwm' # 下記の方法でも冷却ファンの制御が可能 # オフ echo 0 | sudo tee /sys/devices/pwm-fan/target_pwm # 50% echo 128 | sudo tee /sys/devices/pwm-fan/target_pwm # 100% echo 255 | sudo tee /sys/devices/pwm-fan/target_pwm
# アイドル動作時 user@user-desktop:~$ cat /sys/devices/virtual/thermal/thermal_zone*/temp 36000 34000 32000 28500 100000 33000 # 高負荷動作時 user@user-desktop:~$ cat /sys/devices/virtual/thermal/thermal_zone*/temp 59500 58000 54500 52000 100000 56000※ 5個目は常に 100000(100度)っぽい
user@user-desktop:~$ ls -l /sys/devices/virtual/thermal/ total 0 drwxr-xr-x 3 root root 0 4月 21 23:26 cooling_device0 drwxr-xr-x 3 root root 0 4月 21 23:26 cooling_device1 drwxr-xr-x 3 root root 0 4月 21 23:26 cooling_device10 drwxr-xr-x 3 root root 0 4月 21 23:26 cooling_device11 drwxr-xr-x 3 root root 0 4月 21 23:26 cooling_device12 drwxr-xr-x 3 root root 0 4月 21 23:26 cooling_device2 drwxr-xr-x 3 root root 0 4月 21 23:26 cooling_device3 drwxr-xr-x 3 root root 0 4月 21 23:26 cooling_device4 drwxr-xr-x 3 root root 0 4月 21 23:26 cooling_device5 drwxr-xr-x 3 root root 0 4月 21 23:26 cooling_device6 drwxr-xr-x 3 root root 0 4月 21 23:26 cooling_device7 drwxr-xr-x 3 root root 0 4月 21 23:26 cooling_device8 drwxr-xr-x 3 root root 0 4月 21 23:26 cooling_device9 drwxr-xr-x 4 root root 0 4月 21 23:26 thermal_zone0 drwxr-xr-x 3 root root 0 4月 21 23:26 thermal_zone1 drwxr-xr-x 3 root root 0 4月 21 23:26 thermal_zone2 drwxr-xr-x 4 root root 0 4月 21 23:26 thermal_zone3 drwxr-xr-x 3 root root 0 4月 21 23:26 thermal_zone4 drwxr-xr-x 4 root root 0 4月 21 23:26 thermal_zone5
user@user-desktop:~$ ls -l -d /sys/devices/virtual/thermal/th* drwxr-xr-x 4 root root 0 4月 21 23:26 /sys/devices/virtual/thermal/thermal_zone0 drwxr-xr-x 3 root root 0 4月 21 23:26 /sys/devices/virtual/thermal/thermal_zone1 drwxr-xr-x 3 root root 0 4月 21 23:26 /sys/devices/virtual/thermal/thermal_zone2 drwxr-xr-x 4 root root 0 4月 21 23:26 /sys/devices/virtual/thermal/thermal_zone3 drwxr-xr-x 3 root root 0 4月 21 23:26 /sys/devices/virtual/thermal/thermal_zone4 drwxr-xr-x 4 root root 0 4月 21 23:26 /sys/devices/virtual/thermal/thermal_zone5
user@user-desktop:~$ tegrastats --help
Usage: tegrastats [-option]
Options:
--help : print this help screen
--interval <millisec> : sample the information in <milliseconds>
--logfile <filename> : dump the output of tegrastats to <filename>
--load_cfg <filename> : load the information from <filename>
--save_cfg <filename> : save the information to <filename>
--start : run tegrastats as a daemon process in the background
--stop : stop any running instances of tegrastats
--verbose : print verbose message
user@user-desktop:~$ tegrastats
RAM 813/3965MB (lfb 688x4MB) CPU [2%@102,8%@102,0%@102,0%@102] EMC_FREQ 0% GR3D_FREQ 0% PLL@26C CPU@31C PMIC@100C GPU@28C AO@34.5C thermal@29.5C POM_5V_IN 1825/1825 POM_5V_GPU 0/0 POM_5V_CPU 81/81
RAM 813/3965MB (lfb 688x4MB) CPU [1%@102,7%@102,0%@102,0%@102] EMC_FREQ 0% GR3D_FREQ 0% PLL@26C CPU@31.5C PMIC@100C GPU@28C AO@34C thermal@29.75C POM_5V_IN 1825/1825 POM_5V_GPU 0/0 POM_5V_CPU 81/81
RAM 813/3965MB (lfb 688x4MB) CPU [1%@102,8%@102,0%@102,0%@102] EMC_FREQ 0% GR3D_FREQ 0% PLL@26C CPU@31C PMIC@100C GPU@28C AO@34C thermal@29.75C POM_5V_IN 1825/1825 POM_5V_GPU 0/0 POM_5V_CPU 81/81
^C
user@user-desktop:~$ tegrastats
RAM 1124/3957MB (lfb 408x4MB) CPU [100%@1428,100%@1428,100%@1428,100%@1428] EMC_FREQ 0% GR3D_FREQ 0% PLL@59C CPU@66C PMIC@100C GPU@60.5C AO@66C thermal@63.5C POM_5V_IN 5564/5564 POM_5V_GPU 238/238 POM_5V_CPU 3610/3610
RAM 1124/3957MB (lfb 408x4MB) CPU [100%@1428,100%@1428,100%@1428,100%@1428] EMC_FREQ 0% GR3D_FREQ 0% PLL@59C CPU@66.5C PMIC@100C GPU@60C AO@66C thermal@63.5C POM_5V_IN 5564/5564 POM_5V_GPU 238/238 POM_5V_CPU 3610/3610
RAM 1124/3957MB (lfb 408x4MB) CPU [100%@1428,100%@1428,100%@1428,100%@1428] EMC_FREQ 0% GR3D_FREQ 0% PLL@59C CPU@66.5C PMIC@100C GPU@60C AO@66C thermal@63.5C POM_5V_IN 5524/5550 POM_5V_GPU 238/238 POM_5V_CPU 3576/3598
RAM 1124/3957MB (lfb 408x4MB) CPU [100%@1428,100%@1428,100%@1428,100%@1428] EMC_FREQ 0% GR3D_FREQ 0% PLL@59C CPU@66.5C PMIC@100C GPU@60C AO@66C thermal@63.5C POM_5V_IN 5564/5554 POM_5V_GPU 238/238 POM_5V_CPU 3616/3603
^C
user@user-desktop:~$ jetson_clocks Error: Run this script(/usr/bin/jetson_clocks) as a root user user@user-desktop:~$ sudo jetson_clocks --show SOC family:tegra210 Machine:jetson-nano Online CPUs: 0-3 CPU Cluster Switching: Disabled cpu0: Online=1 Governor=schedutil MinFreq=1428000 MaxFreq=1428000 CurrentFreq=1428000 IdleStates: WFI=0 c7=0 cpu1: Online=1 Governor=schedutil MinFreq=1428000 MaxFreq=1428000 CurrentFreq=1428000 IdleStates: WFI=0 c7=0 cpu2: Online=1 Governor=schedutil MinFreq=1428000 MaxFreq=1428000 CurrentFreq=1428000 IdleStates: WFI=0 c7=0 cpu3: Online=1 Governor=schedutil MinFreq=1428000 MaxFreq=1428000 CurrentFreq=1428000 IdleStates: WFI=0 c7=0 GPU MinFreq=921600000 MaxFreq=921600000 CurrentFreq=921600000 EMC MinFreq=204000000 MaxFreq=1600000000 CurrentFreq=1600000000 FreqOverride=1 Fan: speed=255 NV Power Mode: MAXN
# /usr/bin/jetson_clocks の実行には root権限(sudo)が必要
user@user-desktop:~$ /usr/bin/jetson_clocks --show
SOC family:tegra210 Machine:jetson-nano
Error: Run this script(/usr/bin/jetson_clocks) as a root user
# Jetson Nanoの現在の動作状態を表示する
# 通常状態
sudo /usr/bin/jetson_clocks --show
SOC family:tegra210 Machine:jetson-nano
Online CPUs: 0-3
CPU Cluster Switching: Disabled
cpu0: Online=1 Governor=schedutil MinFreq=102000 MaxFreq=1428000 CurrentFreq=614400 IdleStates: WFI=1 c7=1
cpu1: Online=1 Governor=schedutil MinFreq=102000 MaxFreq=1428000 CurrentFreq=921600 IdleStates: WFI=1 c7=1
cpu2: Online=1 Governor=schedutil MinFreq=102000 MaxFreq=1428000 CurrentFreq=710400 IdleStates: WFI=1 c7=1
cpu3: Online=1 Governor=schedutil MinFreq=102000 MaxFreq=1428000 CurrentFreq=921600 IdleStates: WFI=1 c7=1
GPU MinFreq=76800000 MaxFreq=921600000 CurrentFreq=76800000
EMC MinFreq=204000000 MaxFreq=1600000000 CurrentFreq=1600000000 FreqOverride=0
Fan: speed=0
NV Power Mode: MAXN
Jetson Nano Maximizing Tegra Performance
# Jetson Nanoを最高速(最大動作周波数)で動作させる
sudo /usr/bin/jetson_clocks
# Jetson Nanoの現在の動作状態を表示する
# Jetson Nanoを最高速(最大動作周波数)で動作させた場合
sudo /usr/bin/jetson_clocks --show
SOC family:tegra210 Machine:jetson-nano
Online CPUs: 0-3
CPU Cluster Switching: Disabled
cpu0: Online=1 Governor=schedutil MinFreq=1428000 MaxFreq=1428000 CurrentFreq=1428000 IdleStates: WFI=0 c7=0
cpu1: Online=1 Governor=schedutil MinFreq=1428000 MaxFreq=1428000 CurrentFreq=1428000 IdleStates: WFI=0 c7=0
cpu2: Online=1 Governor=schedutil MinFreq=1428000 MaxFreq=1428000 CurrentFreq=1428000 IdleStates: WFI=0 c7=0
cpu3: Online=1 Governor=schedutil MinFreq=1428000 MaxFreq=1428000 CurrentFreq=1428000 IdleStates: WFI=0 c7=0
GPU MinFreq=921600000 MaxFreq=921600000 CurrentFreq=921600000
EMC MinFreq=204000000 MaxFreq=1600000000 CurrentFreq=1600000000 FreqOverride=1
Fan: speed=255
NV Power Mode: MAXN
# Jetson Nano 冷却ファンの状態を取得
user@user-desktop:~$ cat /sys/devices/pwm-fan/target_pwm
255
# /usr/bin/jetson_clocks --help
sudo /usr/bin/jetson_clocks --help
Maximize jetson performance by setting static max frequency to CPU, GPU and EMC clocks.
Usage:
jetson_clocks.sh [options]
options,
--show display current settings
--store [file] store current settings to a file (default: ${HOME}/l4t_dfs.conf)
--restore [file] restore saved settings from a file (default: ${HOME}/l4t_dfs.conf)
run jetson_clocks.sh without any option to set static max frequency to CPU, GPU and EMC clocks.
sudo /usr/bin/jetson_clocks --restore
Error: /home/user/l4t_dfs.conf file not found !
user@user-desktop:~$ sudo nvpmodel
Nvidia Power Model Tool Version 1.1.2
Usage:
nvpmodel [-h | --help] [--verbose] [-q | --query] [-p | --parse] [-u | --udata]
[-w | --wait <sec>] [--boot] [-m | --mode <mode>] [-f | --conf <filename>] [-o | --os <android,l4t>]
-h, --help:
Print this help info.
--verbose:
Enable verbose log.
--boot:
Exit and do nothing if it is sanity-flashed build.
-p, --parse:
Parse the config file only. Recommended to enable verbose log.
-m, --mode <mode>:
<mode> is one of the integer POWER_MODEL ID defined in config file. Switch to the specified power mode.
-f, --conf:
explicitly specify the config file.
If it is the only option, then it sets the power mode as default mode configured in the file.
This option can be used for developer usage to specify a config file other than the default one.
-o, --os <android,l4t>:
Perform OS specific operations for power model settings. Argument is case insensitive.
-q, --query:
Query the current power mode.
-w, --wait:
delay exectuion by specified amount of seconds.
-u, --udata:
specify the absolute path for user data file when set or query power mode.
Examples:
nvpmodel -m 2: switch to POWER_MODEL ID=2 of which settings are defined in the default configuration file.
nvpmodel -m 2 -o android: switch to POWER_MODEL ID=2 and perform Android specific operations for power mode.
nvpmodel -m 2 -f pm.conf: switch to POWER_MODEL ID=2 of which settings are defined in pm.conf.
nvpmodel -m 2 -u /data/status: switch to POWER_MODEL ID=2 and store the active mode as user settings in /data/status.
nvpmodel -f pm.conf: read the active mode in user data file and set it as the power mode which is configured in pm.conf.
If user data file does not exist or the active mode value is invalid, set defalut mode instead.
nvpmodel -q: print the current power mode.
nvpmodel -q --verbose: print the current power mode with verbose info.
nvpmodel -p -f pm.conf: parse pm.conf and print the result.
# MAXNモードの時は CPUは 4個で動作
user@user-desktop:~$ sudo nvpmodel -m 0
user@user-desktop:~$ sudo nvpmodel -q
NV Power Mode: MAXN
0
# 5Wモードの時は CPUは 2個で動作
user@user-desktop:~$ sudo nvpmodel -m 1
user@user-desktop:~$ sudo nvpmodel -q
NV Power Mode: 5W
user@user-desktop:~$ nano -bash: nano: command not found user@user-desktop:~$ sudo apt-get -y install nano user@user-desktop:~$ nano -V GNU nano, version 2.9.3 (C) 1999-2011, 2013-2018 Free Software Foundation, Inc. (C) 2014-2018 the contributors to nano Email: nano@nano-editor.org Web: https://nano-editor.org/ Compiled options: --disable-libmagic --disable-wrapping-as-root --enable-utf8
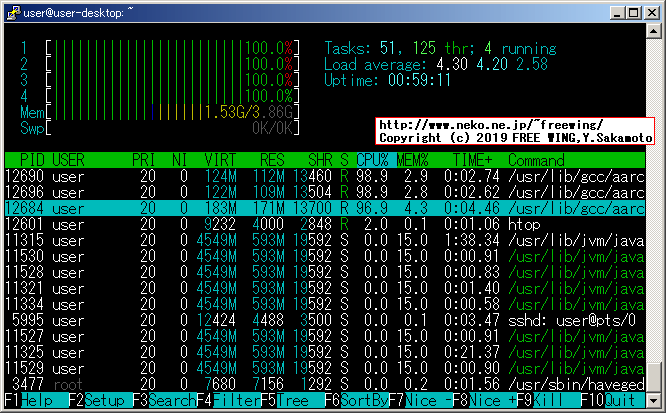
user@user-desktop:~$ sudo apt-get -y install htop
user@user-desktop:~$ nvcc -V gives
nvcc: NVIDIA (R) Cuda compiler driver
Copyright (c) 2005-2018 NVIDIA Corporation
Built on Sun_Sep_30_21:09:22_CDT_2018
Cuda compilation tools, release 10.0, V10.0.166
user@user-desktop:~$ cd /usr/local/cuda/samples/1_Utilities/deviceQuery
user@user-desktop:/usr/local/cuda/samples/1_Utilities/deviceQuery$ sudo make
user@user-desktop:/usr/local/cuda/samples/1_Utilities/deviceQuery$ ./deviceQuery./
deviceQuery Starting...
CUDA Device Query (Runtime API) version (CUDART static linking)
Detected 1 CUDA Capable device(s)
Device 0: "NVIDIA Tegra X1"
CUDA Driver Version / Runtime Version 10.0 / 10.0
CUDA Capability Major/Minor version number: 5.3
Total amount of global memory: 3957 MBytes (4148756480 bytes)
( 1) Multiprocessors, (128) CUDA Cores/MP: 128 CUDA Cores
GPU Max Clock rate: 922 MHz (0.92 GHz)
Memory Clock rate: 13 Mhz
Memory Bus Width: 64-bit
L2 Cache Size: 262144 bytes
Maximum Texture Dimension Size (x,y,z) 1D=(65536), 2D=(65536, 65536), 3D=(4096, 4096, 4096)
Maximum Layered 1D Texture Size, (num) layers 1D=(16384), 2048 layers
Maximum Layered 2D Texture Size, (num) layers 2D=(16384, 16384), 2048 layers
Total amount of constant memory: 65536 bytes
Total amount of shared memory per block: 49152 bytes
Total number of registers available per block: 32768
Warp size: 32
Maximum number of threads per multiprocessor: 2048
Maximum number of threads per block: 1024
Max dimension size of a thread block (x,y,z): (1024, 1024, 64)
Max dimension size of a grid size (x,y,z): (2147483647, 65535, 65535)
Maximum memory pitch: 2147483647 bytes
Texture alignment: 512 bytes
Concurrent copy and kernel execution: Yes with 1 copy engine(s)
Run time limit on kernels: Yes
Integrated GPU sharing Host Memory: Yes
Support host page-locked memory mapping: Yes
Alignment requirement for Surfaces: Yes
Device has ECC support: Disabled
Device supports Unified Addressing (UVA): Yes
Device supports Compute Preemption: No
Supports Cooperative Kernel Launch: No
Supports MultiDevice Co-op Kernel Launch: No
Device PCI Domain ID / Bus ID / location ID: 0 / 0 / 0
Compute Mode:
< Default (multiple host threads can use ::cudaSetDevice() with device simultaneously) >
deviceQuery, CUDA Driver = CUDART, CUDA Driver Version = 10.0, CUDA Runtime Version = 10.0, NumDevs = 1
Result = PASS
Check failed: error == cudaSuccess (48 vs. 0) no kernel image is available for execution on the device CUDA_ARCH := -gencode arch=compute_53,code=sm_53
# http://phantomjs.org/build.html # Requirements development packages of tools and libraries sudo apt-get -y install build-essential g++ flex bison gperf ruby perl \ libsqlite3-dev libfontconfig1-dev libicu-dev libfreetype6 libssl-dev \ libpng-dev libjpeg-dev python libx11-dev libxext-dev # Getting the Code cd git clone git://github.com/ariya/phantomjs.git cd phantomjs git checkout 2.1.1 git submodule init git submodule update # Compile and Link python build.py ... Do you want to continue (Y/n)? ... mv -f libQt5Widgets.a ../../lib/ make[2]: Leaving directory '/home/user/phantomjs/src/qt/qtbase/src/widgets' make[1]: Leaving directory '/home/user/phantomjs/src/qt/qtbase/src' Makefile:44: recipe for target 'sub-src-make_first' failed make: *** [sub-src-make_first] Error 2 ERROR: Failed to build PhantomJS! Building Qt Base failed.
# sudo visudoコマンドを実行する sudo visudo 最初の方に有る Defaults env_reset の行を、 Defaults env_reset, timestamp_timeout=-1 で永久に保持する(タイムアウトしないので最初の 1回だけパスワード入力すれば良い) Defaults env_reset, timestamp_timeout=0 で sudoパスワードを毎回入力 Defaults env_reset, timestamp_timeout=30 で 30分間有効(タイムアウト時間は 30分) Defaults env_reset, timestamp_timeout=60 で 60分間有効(タイムアウト時間は 60分)
# 010_pi-nopasswdファイルを編集する
sudo nano /etc/sudoers.d/010_pi-nopasswd
pi ALL=(ALL) NOPASSWD: ALL
を
pi ALL=(ALL) PASSWD: ALL
に書き換える。
再起動は不要で設定は即時に反映する。
pi@raspberrypi:~ $ sudo echo
We trust you have received the usual lecture from the local System
Administrator. It usually boils down to these three things:
#1) Respect the privacy of others.
#2) Think before you type.
#3) With great power comes great responsibility.
[sudo] password for pi: