・2018/08/27
 【成功版】最新版の Darknetに digitalbrain79版の Darknet with NNPACKの NNPACK処理を適用する
【成功版】最新版の Darknetに digitalbrain79版の Darknet with NNPACKの NNPACK処理を適用する
(ラズパイで NNPACK対応の最新版の Darknetを動かして超高速で物体検出や DeepDreamの悪夢を見る)
Tags: [Raspberry Pi], [電子工作], [ディープラーニング]
● Raspberry Piで 最新版の Darknet with NNPACKをビルドする方法
Raspberry Piで 最新版の Darknet with NNPACKをビルドする方法
Darknet with NNPACK
digitalbrain79版の Darknet with NNPACKは 2017/11の版から更新が止まっています。
元となっている pjreddie版の Darknetは最近も更新しています。
と言う訳で、最新の pjreddie版の Darknetに digitalbrain79版の NNPACKの処理を適用して、最新版の Darknet with NNPACKを Raspberry Piで動かしてヒャッハーします。
同様に、最新の Maratyszcza版の NNPACKにも digitalbrain79版の biasパッチを適用します。
なお、細かい部分でも手作業で最適化を行いました。
●今回動かした Raspberry Pi Raspbian OSのバージョン
RASPBIAN STRETCH WITH DESKTOP
Version:June 2018
Release date: 2018-06-27
Kernel version: 4.14
pi@raspberrypi:~/pytorch $ uname -a
Linux raspberrypi 4.14.50-v7+ #1122 SMP Tue Jun 19 12:26:26 BST 2018 armv7l GNU/Linux
● digitalbrain79版の Darknet with NNPACKの NNPACK処理を最新版の Darknetに適用しました
Darknet with NNPACK
digitalbrain79版の Darknet with NNPACKの NNPACK処理を最新版の Darknetに適用しました。
digitalbrain79/NNPACK-darknet
digitalbrain79/darknet-nnpack
digitalbrain79版の元になった
・Maratyszcza/NNPACK
・pjreddie/darknet
の最新版に digitalbrain79版の Darknet with NNPACKのパッチを当てたブランチを作成しました。
FREEWING-JP/NNPACK_for_Darknet
FREEWING-JP/darknet_nnpack_for_raspberry_pi3
※ デフォルトブランチを masterから変更しています。
# お決まりの sudo apt-get updateで最新状態に更新する
sudo apt-get update
# Initial Setup
sudo apt-get -y install ninja-build
sudo pip install --upgrade git+https://github.com/Maratyszcza/PeachPy
sudo pip install --upgrade git+https://github.com/Maratyszcza/confu
# Build NNPACK-darknet
cd
mkdir fw
cd fw
# git clone https://github.com/digitalbrain79/NNPACK-darknet.git
# cd NNPACK-darknet
# Patch digitalbrain79 Add bias when bias is not NULL
git clone https://github.com/FREEWING-JP/NNPACK_for_Darknet.git
cd NNPACK_for_Darknet
#
confu setup
python ./configure.py --backend auto
# 2コアでビルドで 10分
ninja -j2
# real 9m51.718s
# user 13m19.744s
# sys 0m26.458s
#
sudo cp -a lib/* /usr/lib/
# */
sudo cp include/nnpack.h /usr/include/
sudo cp deps/pthreadpool/include/pthreadpool.h /usr/include/
# Build darknet-nnpack
# https://github.com/digitalbrain79/darknet-nnpack.git
cd
cd fw
# git clone https://github.com/digitalbrain79/darknet-nnpack.git
# Patch digitalbrain79 Darknet with NNPACK diff
git clone https://github.com/FREEWING-JP/darknet_nnpack_for_raspberry_pi3.git
cd darknet_nnpack_for_raspberry_pi3
# 2コアでビルドで 1分 12秒
make -j2
# real 1m12.131s
# user 1m34.961s
# sys 0m3.702s
# Nightmare 悪夢
# jnet-conv.weights (72MB)
wget http://pjreddie.com/media/files/jnet-conv.weights
# wget https://raw.githubusercontent.com/pjreddie/darknet/master/cfg/jnet-conv.cfg
# mv jnet-conv.cfg ./cfg/
./darknet nightmare cfg/jnet-conv.cfg jnet-conv.weights data/horses.jpg 11 -rounds 4 -range 3
./darknet nightmare cfg/jnet-conv.cfg jnet-conv.weights data/eagle.jpg 11 -rounds 2 -range 3
./darknet nightmare cfg/jnet-conv.cfg jnet-conv.weights data/dog.jpg 13 -rounds 1 -range 3
./darknet nightmare cfg/jnet-conv.cfg jnet-conv.weights data/dog.jpg 12 -rounds 1 -range 3
./darknet nightmare cfg/jnet-conv.cfg jnet-conv.weights data/dog.jpg 11 -rounds 1 -range 3
./darknet nightmare cfg/jnet-conv.cfg jnet-conv.weights data/dog.jpg 10 -rounds 1 -range 3
./darknet nightmare cfg/jnet-conv.cfg jnet-conv.weights data/dog.jpg 9 -rounds 1 -range 3
./darknet nightmare cfg/jnet-conv.cfg jnet-conv.weights data/dog.jpg 8 -rounds 1 -range 3
./darknet nightmare cfg/jnet-conv.cfg jnet-conv.weights data/dog.jpg 7 -rounds 1 -range 3
# vgg-conv.weights (56M)
wget http://pjreddie.com/media/files/vgg-conv.weights
./darknet nightmare cfg/vgg-conv.cfg vgg-conv.weights data/scream.jpg 10
# Object Detection 物体検出
# yolov2.weights (194MB)
wget https://pjreddie.com/media/files/yolov2.weights
./darknet detector test cfg/coco.data cfg/yolov2.cfg yolov2.weights data/dog.jpg
# yolov2-tiny-voc.weights (61MB)
wget https://pjreddie.com/media/files/yolov2-tiny-voc.weights
./darknet detector test cfg/voc.data cfg/yolov2-tiny-voc.cfg yolov2-tiny-voc.weights data/dog.jpg
# https://pjreddie.com/darknet/yolo/
# YOLOv3-320 COCO trainval yolov3.cfg yolov3.weights (237M)
wget https://pjreddie.com/media/files/yolov3.weights
./darknet detect cfg/yolov3.cfg yolov3.weights data/dog.jpg
# 26 Segmentation fault
./darknet detector test cfg/coco.data cfg/yolov3.cfg yolov3.weights data/dog.jpg
# 39 Segmentation fault
# https://github.com/pjreddie/darknet/issues/823
# Is this problem about big endian or little endian for model saving?
# YOLOv3-tiny COCO trainval yolov3-tiny.cfg yolov3-tiny.weights (34M)
wget https://pjreddie.com/media/files/yolov3-tiny.weights
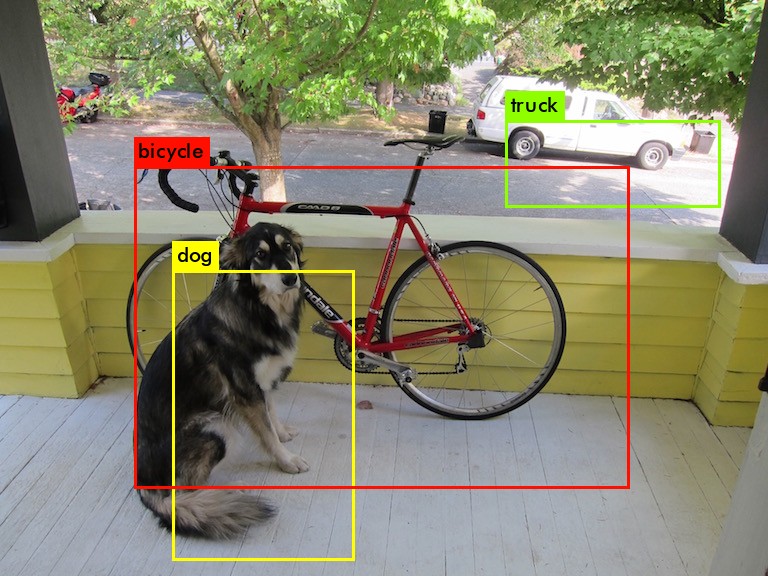
./darknet detect cfg/yolov3-tiny.cfg yolov3-tiny.weights data/dog.jpg
data/dog.jpg: Predicted in 0.982928 seconds.
dog: 57%
car: 52%
truck: 56%
car: 62%
bicycle: 59%
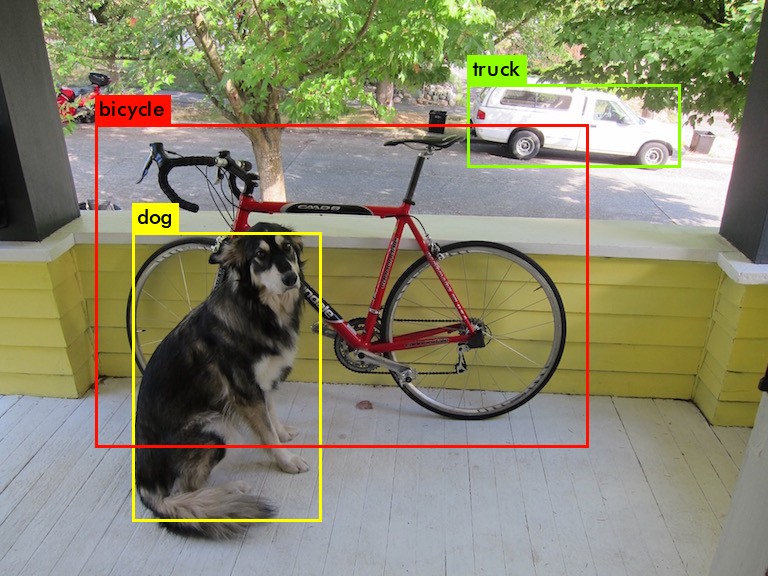
pi@raspberrypi:~/fw/darknet $ ./darknet detector test cfg/coco.data cfg/yolov2.cfg yolov2.weights data/dog.jpg
layer filters size input output
0 conv 32 3 x 3 / 1 608 x 608 x 3 -> 608 x 608 x 32 0.639 BFLOPs
1 max 2 x 2 / 2 608 x 608 x 32 -> 304 x 304 x 32
2 conv 64 3 x 3 / 1 304 x 304 x 32 -> 304 x 304 x 64 3.407 BFLOPs
3 max 2 x 2 / 2 304 x 304 x 64 -> 152 x 152 x 64
4 conv 128 3 x 3 / 1 152 x 152 x 64 -> 152 x 152 x 128 3.407 BFLOPs
5 conv 64 1 x 1 / 1 152 x 152 x 128 -> 152 x 152 x 64 0.379 BFLOPs
6 conv 128 3 x 3 / 1 152 x 152 x 64 -> 152 x 152 x 128 3.407 BFLOPs
7 max 2 x 2 / 2 152 x 152 x 128 -> 76 x 76 x 128
8 conv 256 3 x 3 / 1 76 x 76 x 128 -> 76 x 76 x 256 3.407 BFLOPs
9 conv 128 1 x 1 / 1 76 x 76 x 256 -> 76 x 76 x 128 0.379 BFLOPs
10 conv 256 3 x 3 / 1 76 x 76 x 128 -> 76 x 76 x 256 3.407 BFLOPs
11 max 2 x 2 / 2 76 x 76 x 256 -> 38 x 38 x 256
12 conv 512 3 x 3 / 1 38 x 38 x 256 -> 38 x 38 x 512 3.407 BFLOPs
13 conv 256 1 x 1 / 1 38 x 38 x 512 -> 38 x 38 x 256 0.379 BFLOPs
14 conv 512 3 x 3 / 1 38 x 38 x 256 -> 38 x 38 x 512 3.407 BFLOPs
15 conv 256 1 x 1 / 1 38 x 38 x 512 -> 38 x 38 x 256 0.379 BFLOPs
16 conv 512 3 x 3 / 1 38 x 38 x 256 -> 38 x 38 x 512 3.407 BFLOPs
17 max 2 x 2 / 2 38 x 38 x 512 -> 19 x 19 x 512
18 conv 1024 3 x 3 / 1 19 x 19 x 512 -> 19 x 19 x1024 3.407 BFLOPs
19 conv 512 1 x 1 / 1 19 x 19 x1024 -> 19 x 19 x 512 0.379 BFLOPs
20 conv 1024 3 x 3 / 1 19 x 19 x 512 -> 19 x 19 x1024 3.407 BFLOPs
21 conv 512 1 x 1 / 1 19 x 19 x1024 -> 19 x 19 x 512 0.379 BFLOPs
22 conv 1024 3 x 3 / 1 19 x 19 x 512 -> 19 x 19 x1024 3.407 BFLOPs
23 conv 1024 3 x 3 / 1 19 x 19 x1024 -> 19 x 19 x1024 6.814 BFLOPs
24 conv 1024 3 x 3 / 1 19 x 19 x1024 -> 19 x 19 x1024 6.814 BFLOPs
25 route 16
26 conv 64 1 x 1 / 1 38 x 38 x 512 -> 38 x 38 x 64 0.095 BFLOPs
27 reorg / 2 38 x 38 x 64 -> 19 x 19 x 256
28 route 27 24
29 conv 1024 3 x 3 / 1 19 x 19 x1280 -> 19 x 19 x1024 8.517 BFLOPs
30 conv 425 1 x 1 / 1 19 x 19 x1024 -> 19 x 19 x 425 0.314 BFLOPs
31 detection
mask_scale: Using default '1.000000'
Loading weights from yolov2.weights...Done!
data/dog.jpg: Predicted in 9.017948 seconds.
dog: 83%
truck: 79%
bicycle: 84%
・./darknet detector test cfg/coco.data cfg/yolov2.cfg yolov2.weights data/dog.jpg

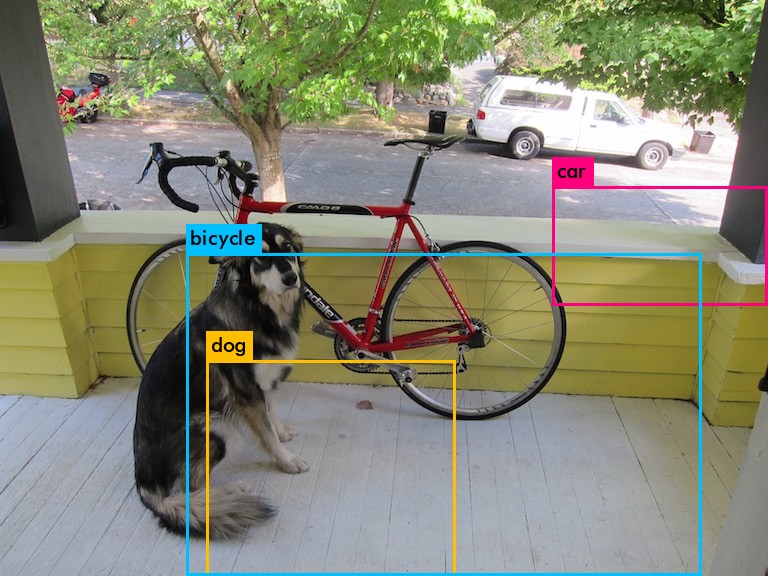
pi@raspberrypi:~/fw/darknet $ ./darknet detector test cfg/voc.data cfg/yolov2-tiny-voc.cfg yolov2-tiny-voc.weights data/dog.jpg
layer filters size input output
0 conv 16 3 x 3 / 1 416 x 416 x 3 -> 416 x 416 x 16 0.150 BFLOPs
1 max 2 x 2 / 2 416 x 416 x 16 -> 208 x 208 x 16
2 conv 32 3 x 3 / 1 208 x 208 x 16 -> 208 x 208 x 32 0.399 BFLOPs
3 max 2 x 2 / 2 208 x 208 x 32 -> 104 x 104 x 32
4 conv 64 3 x 3 / 1 104 x 104 x 32 -> 104 x 104 x 64 0.399 BFLOPs
5 max 2 x 2 / 2 104 x 104 x 64 -> 52 x 52 x 64
6 conv 128 3 x 3 / 1 52 x 52 x 64 -> 52 x 52 x 128 0.399 BFLOPs
7 max 2 x 2 / 2 52 x 52 x 128 -> 26 x 26 x 128
8 conv 256 3 x 3 / 1 26 x 26 x 128 -> 26 x 26 x 256 0.399 BFLOPs
9 max 2 x 2 / 2 26 x 26 x 256 -> 13 x 13 x 256
10 conv 512 3 x 3 / 1 13 x 13 x 256 -> 13 x 13 x 512 0.399 BFLOPs
11 max 2 x 2 / 1 13 x 13 x 512 -> 13 x 13 x 512
12 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs
13 conv 1024 3 x 3 / 1 13 x 13 x1024 -> 13 x 13 x1024 3.190 BFLOPs
14 conv 125 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 125 0.043 BFLOPs
15 detection
mask_scale: Using default '1.000000'
Loading weights from yolov2-tiny-voc.weights...Done!
data/dog.jpg: Predicted in 1.328894 seconds.
dog: 83%
car: 56%
bicycle: 59%
・./darknet detector test cfg/voc.data cfg/yolov2-tiny-voc.cfg yolov2-tiny-voc.weights data/dog.jpg
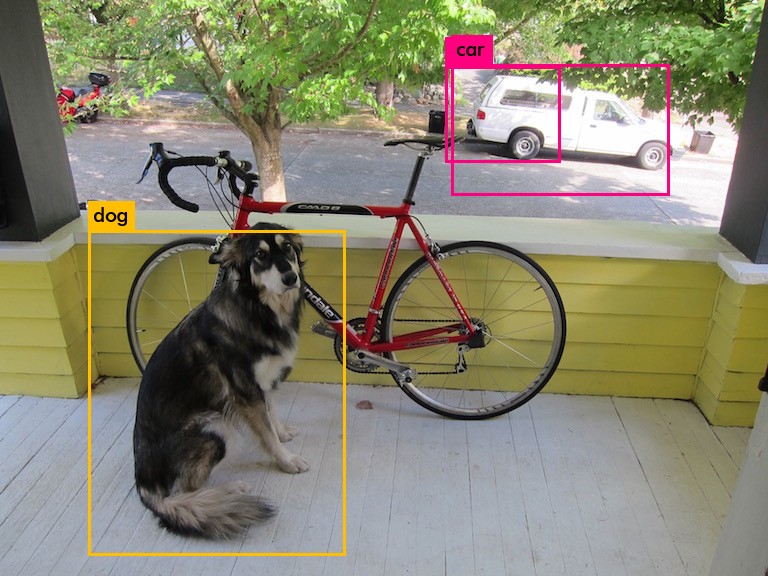
maxpool_layer.cを修正後(物体検出の四角の枠の描画位置が正しくなりました)
・./darknet detector test cfg/coco.data cfg/yolov2.cfg yolov2.weights data/dog.jpg
・./darknet detector test cfg/voc.data cfg/yolov2-tiny-voc.cfg yolov2-tiny-voc.weights data/dog.jpg
● Raspberry Pi 3での digitalbrain79 Darknet with NNPACKのベンチマーク
● Raspberry Pi 3 Model B、Darknet with NNPACK benchmark
./darknet detector test cfg/coco.data cfg/yolov2.cfg yolov2.weights data/dog.jpg
| optimize | gemm.c | OpenMP | ARM NEON | NNPACK | Time(秒) |
| No optimize | - | - | - | - | 445 sec |
| gemm only | * | - | - | - | 382 sec |
| OpenMP only | - | * | - | - | 141 sec |
| gemm + OpenMP | * | * | - | - | 128 sec |
| + ARM NEON | * | * | * | - | 83 sec |
| + NNPACK | * | * | * | * | 12 sec |
./darknet detector test cfg/coco.data cfg/yolov2.cfg yolov2.weights data/dog.jpg
Makefile
GPU=0
CUDNN=0
OPENCV=0
OPENMP=0
DEBUG=0
NNPACK=0
ARM_NEON=0
STBI_NEON=0
No optimize
data/dog.jpg: Predicted in 445.699451 seconds.
data/dog.jpg: Predicted in 452.022224 seconds.
data/dog.jpg: Predicted in 450.958672 seconds.
dog: 82%
truck: 64%
bicycle: 85%
● gemm.c optimized
./darknet detector test cfg/coco.data cfg/yolov2.cfg yolov2.weights data/dog.jpg
Makefile
GPU=0
CUDNN=0
OPENCV=0
OPENMP=0
DEBUG=0
NNPACK=0
ARM_NEON=0
STBI_NEON=0
gemm.c optimized
data/dog.jpg: Predicted in 418.481606 seconds.
data/dog.jpg: Predicted in 382.948527 seconds.
data/dog.jpg: Predicted in 400.786624 seconds.
dog: 82%
truck: 64%
bicycle: 85%
● OpenMP
./darknet detector test cfg/coco.data cfg/yolov2.cfg yolov2.weights data/dog.jpg
Makefile
GPU=0
CUDNN=0
OPENCV=0
OPENMP=1
DEBUG=0
NNPACK=0
ARM_NEON=0
STBI_NEON=0
data/dog.jpg: Predicted in 141.379768 seconds.
data/dog.jpg: Predicted in 144.121333 seconds.
data/dog.jpg: Predicted in 142.067783 seconds.
dog: 82%
truck: 64%
bicycle: 85%
● OpenMP + gemm.c optimized
./darknet detector test cfg/coco.data cfg/yolov2.cfg yolov2.weights data/dog.jpg
Makefile
GPU=0
CUDNN=0
OPENCV=0
OPENMP=1
DEBUG=0
NNPACK=0
ARM_NEON=0
STBI_NEON=0
OpenMP + gemm.c optimized
data/dog.jpg: Predicted in 134.488275 seconds.
data/dog.jpg: Predicted in 128.075909 seconds.
data/dog.jpg: Predicted in 129.822826 seconds.
dog: 82%
truck: 64%
bicycle: 85%
● ARM NEON + OpenMP + gemm.c optimized
./darknet detector test cfg/coco.data cfg/yolov2.cfg yolov2.weights data/dog.jpg
Makefile
GPU=0
CUDNN=0
OPENCV=0
OPENMP=1
DEBUG=0
NNPACK=0
ARM_NEON=1
STBI_NEON=1
ARM NEON + OpenMP + gemm.c optimized
data/dog.jpg: Predicted in 85.205355 seconds.
data/dog.jpg: Predicted in 83.948154 seconds.
data/dog.jpg: Predicted in 84.931311 seconds.
dog: 82%
truck: 64%
bicycle: 85%
● NNPACK + ARM NEON + OpenMP + gemm.c optimized
./darknet detector test cfg/coco.data cfg/yolov2.cfg yolov2.weights data/dog.jpg
Makefile
GPU=0
CUDNN=0
OPENCV=0
OPENMP=1
DEBUG=0
NNPACK=1
ARM_NEON=1
STBI_NEON=1
NNPACK + ARM NEON + OpenMP + gemm.c optimized
data/dog.jpg: Predicted in 12.674640 seconds.
data/dog.jpg: Predicted in 13.312412 seconds.
data/dog.jpg: Predicted in 12.714760 seconds.
dog: 82%
truck: 64%
bicycle: 85%
● Raspberry Pi 3B Darknet with NNPACK benchmark 2
nightmare scream
time ./darknet nightmare cfg/vgg-conv.cfg vgg-conv.weights data/scream.jpg 10
| optimize | gemm.c | OpenMP | ARM NEON | NNPACK | Time(分) |
| No optimize | - | - | - | - | ??? min |
| gemm only | * | - | - | - | ??? min |
| gemm + NNPACK | * | - | - | * | 87 min |
| + OpenMP | * | * | - | * | 28 min |
| + ARM NEON | * | * | * | * | 22 min |
OPENMP=0
NNPACK=1
ARM_NEON=0
STBI_NEON=0
real 87m13.582s
user 90m45.465s
sys 0m7.923s
OPENMP=1
NNPACK=1
ARM_NEON=0
STBI_NEON=0
real 28m32.102s
user 103m11.944s
sys 0m9.695s
OPENMP=1
NNPACK=1
ARM_NEON=1
STBI_NEON=1
real 22m18.132s
user 78m47.156s
sys 0m11.322s
real 22m21.919s
user 78m21.531s
sys 0m10.831s
下記はラズパイ3B+の cpu-infoの結果
Pi3B = Broadcom BCM2837, Cortex-A53 v8-A, Quad-Core(32bit mode)
# CPU INFOrmation library
# https://github.com/pytorch/cpuinfo
pi@raspberrypi:~/cpuinfo $ uname -a
Linux raspberrypi 4.14.50-v7+ #1122 SMP Tue Jun 19 12:26:26 BST 2018 armv7l GNU/Linux
pi@raspberrypi:~/cpuinfo $ bin/cpu-info
Packages:
0: Unknown
Cores:
0: 1 processor (0), ARM Cortex-A53
1: 1 processor (1), ARM Cortex-A53
2: 1 processor (2), ARM Cortex-A53
3: 1 processor (3), ARM Cortex-A53
Logical processors:
0
1
2
3
pi@raspberrypi:~/cpuinfo $ bin/isa-info
Instruction sets:
Thumb: yes
Thumb 2: yes
ARMv5E: yes
ARMv6: yes
ARMv6-K: yes
ARMv7: yes
ARMv7 MP: yes
IDIV: yes
Floating-Point support:
VFPv2: no
VFPv3: yes
VFPv3+D32: yes
VFPv3+FP16: yes
VFPv3+FP16+D32: yes
VFPv4: yes
VFPv4+D32: yes
VJCVT: no
SIMD extensions:
WMMX: no
WMMX 2: no
NEON: yes
NEON-FP16: yes
NEON-FMA: yes
NEON VQRDMLAH/VQRDMLSH: no
NEON FP16 arithmetics: no
NEON complex: no
Cryptography extensions:
AES: no
SHA1: no
SHA2: no
PMULL: no
CRC32: yes
pi@raspberrypi:~/cpuinfo $ bin/cache-info
L1 instruction cache: 4 x 16 KB, 2-way set associative (128 sets), 64 byte lines, shared by 1 processors
L1 data cache: 4 x 16 KB, 4-way set associative (64 sets), 64 byte lines, shared by 1 processors
L2 data cache: 256 KB (exclusive), 16-way set associative (256 sets), 64 byte lines, shared by 4 processors
● Orange Pi PC2 ARM 64bitでの digitalbrain79 Darknet with NNPACKのベンチマーク
● Orange Pi PC 2 ARM 64bit、Darknet with NNPACK benchmark
Orange Pi PC2 = Allwinner H5 sun50i, Cortex-A53 v8-A, Quad-Core
user@orangepipc2:~/cpuinfo$ uname -a
Linux orangepipc2 4.14.15-sunxi64 #30 SMP Tue Jan 30 17:40:12 CET 2018 aarch64 GNU/Linux
wget https://pjreddie.com/media/files/yolov2.weights
./darknet detector test cfg/coco.data cfg/yolov2.cfg yolov2.weights data/dog.jpg
Loading weights from yolov2.weights...Done!
data/dog.jpg: Predicted in 9.788583 seconds.
dog: 82%
truck: 64%
bicycle: 85%
# Nightmare
wget http://pjreddie.com/media/files/vgg-conv.weights
./darknet nightmare cfg/vgg-conv.cfg vgg-conv.weights data/scream.jpg 10
real 15m39.909s
user 58m5.198s
sys 0m5.351s
real 15m50.974s
user 58m40.321s
sys 0m5.267s
wget http://pjreddie.com/media/files/jnet-conv.weights
./darknet nightmare cfg/jnet-conv.cfg jnet-conv.weights data/horses.jpg 11 -rounds 4 -range 3
16 conv 1024 3 x 3 / 1 1 x 1 x1024 -> 1 x 1 x1024 0.019 BFLOPs
17 max 2 x 2 / 2 1 x 1 x1024 -> 1 x 1 x1024
Loading weights from jnet-conv.weights...Done!
Iteration: 0,
net: 773 512 1187328 im: 773 512 3
Killed
wget https://pjreddie.com/media/files/yolov2.weights
./darknet detector test cfg/coco.data cfg/yolov2.cfg yolov2.weights data/dog.jpg
Loading weights from yolov2.weights...Done!
data/dog.jpg: Predicted in 9.667782 seconds.
dog: 82%
truck: 64%
bicycle: 85%
wget https://pjreddie.com/media/files/yolov2-tiny-voc.weights
./darknet detector test cfg/voc.data cfg/yolov2-tiny-voc.cfg yolov2-tiny-voc.weights data/dog.jpg
Loading weights from yolov2-tiny-voc.weights...Done!
data/dog.jpg: Predicted in 1.497692 seconds.
dog: 78%
car: 55%
car: 50%
wget https://pjreddie.com/media/files/yolov3.weights
./darknet detect cfg/yolov3.cfg yolov3.weights data/dog.jpg
105 conv 255 1 x 1 / 1 76 x 76 x 256 -> 76 x 76 x 255 0.754 BFLOPs
106 yolo
Loading weights from yolov3.weights...Done!
Killed
wget https://pjreddie.com/media/files/yolov3-tiny.weights
./darknet detect cfg/yolov3-tiny.cfg yolov3-tiny.weights data/dog.jpg
22 conv 255 1 x 1 / 1 26 x 26 x 256 -> 26 x 26 x 255 0.088 BFLOPs
23 yolo
Loading weights from yolov3-tiny.weights...Done!
data/dog.jpg: Predicted in 1.309047 seconds.
dog: 57%
car: 52%
truck: 56%
car: 62%
bicycle: 59%
# CPU INFOrmation library
# https://github.com/pytorch/cpuinfo
cd
git clone https://github.com/pytorch/cpuinfo.git
cd cpuinfo
confu setup
python configure.py
ninja
bin/cpu-info
bin/isa-info
bin/cache-info
user@orangepipc2:~/cpuinfo$ bin/cpu-info
Packages:
0: Unknown
Cores:
0: 1 processor (0), ARM Cortex-A53
1: 1 processor (1), ARM Cortex-A53
2: 1 processor (2), ARM Cortex-A53
3: 1 processor (3), ARM Cortex-A53
Logical processors:
0
1
2
3
user@orangepipc2:~/cpuinfo$ bin/isa-info
Instruction sets:
ARM v8.1 atomics: no
ARM v8.1 SQRDMLxH: no
ARM v8.2 FP16 arithmetics: no
ARM v8.3 JS conversion: no
ARM v8.3 complex: no
Cryptography extensions:
AES: yes
SHA1: yes
SHA2: yes
PMULL: yes
CRC32: yes
user@orangepipc2:~/cpuinfo$ bin/cache-info
L1 instruction cache: 4 x 16 KB, 2-way set associative (128 sets), 64 byte lines, shared by 1 processors
L1 data cache: 4 x 16 KB, 4-way set associative (64 sets), 64 byte lines, shared by 1 processors
L2 data cache: 256 KB (exclusive), 16-way set associative (256 sets), 64 byte lines, shared by 4 processors
● Darknet demo
# Real-Time Detection on a Webcam
./darknet detector demo cfg/coco.data cfg/yolov3.cfg yolov3.weights
# Demo needs OpenCV for webcam images.
# Install OpenCV lib.
sudo apt-get -y install libopencv-dev
# Setting up libopencv-dev (2.4.9.1+dfsg1-2) ...
sudo apt-get -y install libcv-dev libcvaux-dev libhighgui-dev
# 0 upgraded, 0 newly installed, 0 to remove and 68 not upgraded.
# nano Makefile
# OPENCV=1
make -j2
./darknet detector demo cfg/coco.data cfg/yolov3.cfg yolov3.weights
# 35 Segmentation fault
# YOLOv2
./darknet detector demo cfg/coco.data cfg/yolov2.cfg yolov2.weights
# (Demo:2620): Gtk-WARNING **: cannot open display:
# Start X Window System
sudo systemctl start lightdm
detector.c
int width = find_int_arg(argc, argv, "-w", 0);
int height = find_int_arg(argc, argv, "-h", 0);
int fps = find_int_arg(argc, argv, "-fps", 0);
//int class = find_int_arg(argc, argv, "-class", 0);
width = 640;
height = 480;
fps = 1;
demo.c
cvMoveWindow("Demo", 0, 0);
if (!w || !h) {
cvResizeWindow("Demo", 640, 480);
} else {
cvResizeWindow("Demo", w, h);
}
demo.c
# NNPACK patch
...
srand(2222222);
#ifdef NNPACK
nnp_initialize();
net->threadpool = pthreadpool_create(4);
#endif
int i;
...
pthread_join(detect_thread, 0);
++count;
}
#ifdef NNPACK
pthreadpool_destroy(net->threadpool);
nnp_deinitialize();
#endif
}
● Darknet with NNPACKの変更内容
FREEWING-JP/darknet_nnpack_for_raspberry_pi3 feature/darknet-nnpack
・ Patch digitalbrain79 Darknet with NNPACK diff
最新の pjreddie版の Darknetに digitalbrain79版の NNPACKの処理を適用
・ fix detection rectangle
物体検出の四角の枠の描画位置を修正(基準座標を修正)
・ nightmare with NNPACK
nightmareに NNPACKを適用
・ fix Makefile for Newest Maratyszcza/NNPACK
最新の NNPACKライブラリは cpuinfoライブラリが必要
・ mod Makefile optimize for Raspberry Pi3
Raspberry Pi3用に Makefileのビルドオプションを変更
・ mod batchnorm_layer.c
batchnorm_layer.cの net.trainの時も NNPACK処理を適用
● NNPACKライブラリ
FREEWING-JP/NNPACK feature/bias_darknet
・ Patch digitalbrain79 Add bias when bias is not NULL
Add bias when bias is not NULL
● Darknet with NNPACK digitalbrain79版の差分
Darknet with NNPACK
NNPACK部分と ARM_NEON部分の差分。
digitalbrain79/NNPACK-darknet
digitalbrain79/darknet-nnpack
examples\detector.c
void test_detector(...)
{
...
float nms=.3;
#ifdef NNPACK
nnp_initialize();
net->threadpool = pthreadpool_create(4);
#endif
...
#ifdef NNPACK
image im = load_image_thread(input, 0, 0, net->c, net->threadpool);
image sized = letterbox_image_thread(im, net->w, net->h, net->threadpool);
#else
image im = load_image_color(input,0,0);
image sized = letterbox_image(im, net->w, net->h);
#endif
...
#ifdef NNPACK
pthreadpool_destroy(net->threadpool);
nnp_deinitialize();
#endif
}
include\darknet.h
#ifdef NNPACK
#include <nnpack.h>
#endif
typedef struct network{
...
#ifdef NNPACK
pthreadpool_t threadpool;
#endif
} network;
...
image load_image(char *filename, int w, int h, int c);
#ifdef NNPACK
image load_image_thread(char *filename, int w, int h, int c, pthreadpool_t threadpool);
#endif
...
image letterbox_image(image im, int w, int h);
#ifdef NNPACK
image letterbox_image_thread(image im, int w, int h, pthreadpool_t threadpool);
#endif
src\activations.c
#ifdef NNPACK
struct activate_params {
float *x;
int n;
ACTIVATION a;
};
void activate_array_compute(struct activate_params *params, size_t c)
{
int i;
for (i = 0; i < params->n; i++) {
params->x[c*params->n + i] = activate(params->x[c*params->n + i], params->a);
}
}
void activate_array_thread(float *x, const int c, const int n, const ACTIVATION a, pthreadpool_t threadpool)
{
struct activate_params params = { x, n, a };
pthreadpool_compute_1d(threadpool, (pthreadpool_function_1d_t)activate_array_compute, ¶ms, c);
}
#endif
src\activations.h
#ifdef NNPACK
void activate_array_thread(float *x, const int c, const int n, const ACTIVATION a, pthreadpool_t threadpool);
#endif
src\batchnorm_layer.c
#ifdef NNPACK
struct normalize_params {
float *x;
float *mean;
float *variance;
int spatial;
};
void normalize_cpu_thread(struct normalize_params *params, size_t batch, size_t filters)
{
int i;
float div = sqrt(params->variance[filters]) + .000001f;
for(i = 0; i < params->spatial; i++){
int index = batch*filters*params->spatial + filters*params->spatial + i;
params->x[index] = (params->x[index] - params->mean[filters])/div;
}
}
#endif
...
#ifdef NNPACK
struct normalize_params params = { l.output, l.rolling_mean, l.rolling_variance, l.out_h*l.out_w };
pthreadpool_compute_2d(net.threadpool, (pthreadpool_function_2d_t)normalize_cpu_thread,
¶ms, l.batch, l.out_c);
#else
normalize_cpu(l.output, l.rolling_mean, l.rolling_variance, l.batch, l.out_c, l.out_h*l.out_w);
#endif
src\convolutional_layer.c
#ifdef NNPACK
l.forward = forward_convolutional_layer_nnpack;
#else
l.forward = forward_convolutional_layer;
#endif
...
#ifdef NNPACK
void forward_convolutional_layer_nnpack(convolutional_layer l, network net)
{
struct nnp_size input_size = { l.w, l.h };
struct nnp_padding input_padding = { l.pad, l.pad, l.pad, l.pad };
struct nnp_size kernel_size = { l.size, l.size };
struct nnp_size stride = { l.stride, l.stride };
nnp_convolution_inference(
nnp_convolution_algorithm_implicit_gemm,
nnp_convolution_transform_strategy_tuple_based,
l.c,
l.n,
input_size,
input_padding,
kernel_size,
stride,
net.input,
l.weights,
NULL,
l.output,
NULL,
NULL,
nnp_activation_identity,
NULL,
net.threadpool,
NULL
);
int out_h = convolutional_out_height(l);
int out_w = convolutional_out_width(l);
int n = out_h*out_w;
if(l.batch_normalize){
forward_batchnorm_layer(l, net);
} else {
add_bias(l.output, l.biases, l.batch, l.n, out_h*out_w);
}
activate_array_thread(l.output, l.n, n, l.activation, net.threadpool);
if(l.binary || l.xnor) swap_binary(&l);
}
#endif
void forward_convolutional_layer(convolutional_layer l, network net)
{
int i, j;
fill_cpu(l.outputs*l.batch, 0, l.output, 1);
if(l.xnor){
binarize_weights(l.weights, l.n, l.c/l.groups*l.size*l.size, l.binary_weights);
swap_binary(&l);
binarize_cpu(net.input, l.c*l.h*l.w*l.batch, l.binary_input);
net.input = l.binary_input;
}
int m = l.n/l.groups;
int k = l.size*l.size*l.c/l.groups;
int n = l.out_w*l.out_h;
for(i = 0; i < l.batch; ++i){
for(j = 0; j < l.groups; ++j){
float *a = l.weights + j*l.nweights/l.groups;
float *b = net.workspace;
float *c = l.output + (i*l.groups + j)*n*m;
im2col_cpu(net.input + (i*l.groups + j)*l.c/l.groups*l.h*l.w,
l.c/l.groups, l.h, l.w, l.size, l.stride, l.pad, b);
gemm(0,0,m,n,k,1,a,k,b,n,1,c,n);
}
}
if(l.batch_normalize){
forward_batchnorm_layer(l, net);
} else {
add_bias(l.output, l.biases, l.batch, l.n, l.out_h*l.out_w);
}
activate_array(l.output, l.outputs*l.batch, l.activation);
if(l.binary || l.xnor) swap_binary(&l);
}
src\convolutional_layer.h
#ifdef NNPACK
void forward_convolutional_layer_nnpack(const convolutional_layer layer, network net);
#endif
void forward_convolutional_layer(const convolutional_layer layer, network net);
src\image.c
#ifdef NNPACK
struct resize_image_params {
image im;
image resized;
image part;
int w;
int h;
};
void resize_image_compute_w(struct resize_image_params *params, size_t k, size_t r)
{
int c;
float w_scale = (float)(params->im.w - 1) / (params->w - 1);
for(c = 0; c < params->w; ++c){
float val = 0;
if(c == params->w-1 || params->im.w == 1){
val = get_pixel(params->im, params->im.w-1, r, k);
} else {
float sx = c*w_scale;
int ix = (int) sx;
float dx = sx - ix;
val = (1 - dx) * get_pixel(params->im, ix, r, k) + dx * get_pixel(params->im, ix+1, r, k);
}
set_pixel(params->part, c, r, k, val);
}
}
void resize_image_compute_h(struct resize_image_params *params, size_t k, size_t r)
{
int c;
float h_scale = (float)(params->im.h - 1) / (params->h - 1);
float sy = r*h_scale;
int iy = (int) sy;
float dy = sy - iy;
for(c = 0; c < params->w; ++c){
float val = (1-dy) * get_pixel(params->part, c, iy, k);
set_pixel(params->resized, c, r, k, val);
}
if(r == params->h-1 || params->im.h == 1) return;
for(c = 0; c < params->w; ++c){
float val = dy * get_pixel(params->part, c, iy+1, k);
add_pixel(params->resized, c, r, k, val);
}
}
image resize_image_thread(image im, int w, int h, pthreadpool_t threadpool)
{
image resized = make_image(w, h, im.c);
image part = make_image(w, im.h, im.c);
struct resize_image_params params = { im, resized, part, w, h };
pthreadpool_compute_2d(threadpool, (pthreadpool_function_2d_t)resize_image_compute_w,
¶ms, im.c, im.h);
pthreadpool_compute_2d(threadpool, (pthreadpool_function_2d_t)resize_image_compute_h,
¶ms, im.c, h);
free_image(part);
return resized;
}
image letterbox_image_thread(image im, int w, int h, pthreadpool_t threadpool)
{
int new_w = im.w;
int new_h = im.h;
if (((float)w/im.w) < ((float)h/im.h)) {
new_w = w;
new_h = (im.h * w)/im.w;
} else {
new_h = h;
new_w = (im.w * h)/im.h;
}
image resized = resize_image_thread(im, new_w, new_h, threadpool);
image boxed = make_image(w, h, im.c);
fill_image(boxed, .5);
//int i;
//for(i = 0; i < boxed.w*boxed.h*boxed.c; ++i) boxed.data[i] = 0;
embed_image(resized, boxed, (w-new_w)/2, (h-new_h)/2);
free_image(resized);
return boxed;
}
#endif
...
image resize_image(image im, int w, int h)
{
image resized = make_image(w, h, im.c);
image part = make_image(w, im.h, im.c);
int r, c, k;
float w_scale = (float)(im.w - 1) / (w - 1);
float h_scale = (float)(im.h - 1) / (h - 1);
for(k = 0; k < im.c; ++k){
for(r = 0; r < im.h; ++r){
for(c = 0; c < w; ++c){
float val = 0;
if(c == w-1 || im.w == 1){
val = get_pixel(im, im.w-1, r, k);
} else {
float sx = c*w_scale;
int ix = (int) sx;
float dx = sx - ix;
val = (1 - dx) * get_pixel(im, ix, r, k) + dx * get_pixel(im, ix+1, r, k);
}
set_pixel(part, c, r, k, val);
}
}
}
for(k = 0; k < im.c; ++k){
for(r = 0; r < h; ++r){
float sy = r*h_scale;
int iy = (int) sy;
float dy = sy - iy;
for(c = 0; c < w; ++c){
float val = (1-dy) * get_pixel(part, c, iy, k);
set_pixel(resized, c, r, k, val);
}
if(r == h-1 || im.h == 1) continue;
for(c = 0; c < w; ++c){
float val = dy * get_pixel(part, c, iy+1, k);
add_pixel(resized, c, r, k, val);
}
}
}
free_image(part);
return resized;
}
src\maxpool_layer.c
#ifdef NNPACK
struct maxpool_params {
const maxpool_layer *l;
network *net;
};
void maxpool_thread(struct maxpool_params *params, size_t b, size_t k)
{
int i, j, m, n;
int w_offset = -params->l->pad;
int h_offset = -params->l->pad;
int h = params->l->out_h;
int w = params->l->out_w;
int c = params->l->c;
for(i = 0; i < h; ++i){
for(j = 0; j < w; ++j){
int out_index = j + w*(i + h*(k + c*b));
float max = -FLT_MAX;
int max_i = -1;
for(n = 0; n < params->l->size; ++n){
for(m = 0; m < params->l->size; ++m){
int cur_h = h_offset + i*params->l->stride + n;
int cur_w = w_offset + j*params->l->stride + m;
int index = cur_w + params->l->w*(cur_h + params->l->h*(k + b*params->l->c));
int valid = (cur_h >= 0 && cur_h < params->l->h &&
cur_w >= 0 && cur_w < params->l->w);
float val = (valid != 0) ? params->net->input[index] : -FLT_MAX;
max_i = (val > max) ? index : max_i;
max = (val > max) ? val : max;
}
}
params->l->output[out_index] = max;
params->l->indexes[out_index] = max_i;
}
}
}
#endif
void forward_maxpool_layer(const maxpool_layer l, network net)
{
#ifdef NNPACK
struct maxpool_params params = { &l, &net };
pthreadpool_compute_2d(net.threadpool, (pthreadpool_function_2d_t)maxpool_thread,
¶ms, l.batch, l.c);
#else
int b,i,j,k,m,n;
int w_offset = -l.pad;
int h_offset = -l.pad;
int h = l.out_h;
int w = l.out_w;
int c = l.c;
for(b = 0; b < l.batch; ++b){
for(k = 0; k < c; ++k){
for(i = 0; i < h; ++i){
for(j = 0; j < w; ++j){
int out_index = j + w*(i + h*(k + c*b));
float max = -FLT_MAX;
int max_i = -1;
for(n = 0; n < l.size; ++n){
for(m = 0; m < l.size; ++m){
int cur_h = h_offset + i*l.stride + n;
int cur_w = w_offset + j*l.stride + m;
int index = cur_w + l.w*(cur_h + l.h*(k + b*l.c));
int valid = (cur_h >= 0 && cur_h < l.h &&
cur_w >= 0 && cur_w < l.w);
float val = (valid != 0) ? net.input[index] : -FLT_MAX;
max_i = (val > max) ? index : max_i;
max = (val > max) ? val : max;
}
}
l.output[out_index] = max;
l.indexes[out_index] = max_i;
}
}
}
}
#endif
}
src\blas.c
#ifdef ARM_NEON
#include <arm_neon.h>
#endif
...
void scal_cpu(int N, float ALPHA, float *X, int INCX)
{
int i;
#ifdef ARM_NEON
float32x4_t alpha = vdupq_n_f32(ALPHA);
for (i = 0; i < N; i+=4) {
vst1q_f32(X + i*INCX, vmulq_f32(vld1q_f32(X + i*INCX), alpha));
}
#else
for(i = 0; i < N; ++i) X[i*INCX] *= ALPHA;
#endif
}
src\stb_image.h
#ifdef STBI_NEON
#include <arm_neon.h>
#define STBI_SIMD_ALIGN(type, name) type name __attribute__((aligned(16)))
#endif
...
・ nightmare with NNPACK
・dog_jnet-conv_11_000000.jpg
・dog_jnet-conv_11_000001.jpg
・dog_jnet-conv_11_000003.jpg
・eagle_jnet-conv_11_000003.jpg
・horses_jnet-conv_11_000000.jpg
・horses_jnet-conv_11_000001.jpg
・horses_jnet-conv_11_000002.jpg
・horses_jnet-conv_11_000003.jpg
・person_jnet-conv_11_000000.jpg
・person_jnet-conv_11_000001.jpg
・person_jnet-conv_1_000000.jpg
・person_jnet-conv_7_000000.jpg
・person_jnet-conv_7_000001.jpg
・person_jnet-conv_8_000000.jpg
・scream_vgg-conv_10_000000.jpg
● 主な Raspberry Piの CPUの一覧
| Raspberry Zero | BCM2835 | ARM1176JZF-S | ARMv6 | ARM11 | 1 core |
| Raspberry Pi 2 | BCM2836 | ARM Cortex-A7 | ARMv7 | Cortex-A | 4 core |
| Raspberry Pi 2(V1.2) | BCM2837 | ARM Cortex-A53 | ARMv8 | Cortex-A | 4 core |
| Raspberry Pi 3 | BCM2837 | ARM Cortex-A53 | ARMv8 | Cortex-A | 4 core |
※ Raspberry Pi2 Model B V1.2(Element14製)は CPU(SoC)が BCM2836から BCM2837に変更されました。
● gccの最適化の設定
3.10 Options That Control Optimization - Using the GNU Compiler Collection (GCC)
● 3.10 Options That Control Optimization
Using the GNU Compiler Collection (GCC)
This file documents the use of the GNU compilers.
-O3
Optimize yet more. -O3 turns on all optimizations specified by -O2 and also turns on the -finline-functions, -funswitch-loops, -fpredictive-commoning, -fgcse-after-reload, -ftree-loop-vectorize, -ftree-loop-distribute-patterns, -fsplit-paths -ftree-slp-vectorize, -fvect-cost-model, -ftree-partial-pre and -fipa-cp-clone options.
-Ofast
Disregard strict standards compliance. -Ofast enables all -O3 optimizations. It also enables optimizations that are not valid for all standard-compliant programs. It turns on -ffast-math and the Fortran-specific -fno-protect-parens and -fstack-arrays.
-ffast-math
Sets the options -fno-math-errno, -funsafe-math-optimizations, -ffinite-math-only, -fno-rounding-math, -fno-signaling-nans and -fcx-limited-range.
This option causes the preprocessor macro __FAST_MATH__ to be defined.
ARM Cortex-A53
NEON advanced SIMD
DSP & SIMD extensions
VFPv4 floating point
Hardware virtualization support
● 3.18.4 ARM Options
3.18.4 ARM Options
-march=name[+extension…]
This specifies the name of the target ARM architecture. GCC uses this name to determine what kind of instructions it can emit when generating assembly code. This option can be used in conjunction with or instead of the -mcpu= option.
-march=armv7-a
-march=armv7ve
# The extended version of the ARMv7-A architecture with support for virtualization.
-march=armv7ve+neon-vfpv4
gcc: error: unrecognized argument in option ‘-march=armv7ve+neon-vfpv4’
-mtune=name
This option specifies the name of the target ARM processor for which GCC should tune the performance of the code.
-mtune=cortex-a53
-mcpu=name[+extension…]
This specifies the name of the target ARM processor. GCC uses this name to derive the name of the target ARM architecture (as if specified by -march) and the ARM processor type for which to tune for performance (as if specified by -mtune). Where this option is used in conjunction with -march or -mtune, those options take precedence over the appropriate part of this option.
-mfpu=name
This specifies what floating-point hardware (or hardware emulation) is available on the target.
The setting ‘auto’ is the default and is special. It causes the compiler to select the floating-point and Advanced SIMD instructions based on the settings of -mcpu and -march.
-mfpu=neon-vfpv4
● 3.18.1 AArch64 Options
3.18.1 AArch64 Options
These options are defined for AArch64 implementations
● gccの最適化 -O4の指定について
GCCの最適化
このガイドは、コンパイル済みコードを安全で分別のある CFLAGSと CXXFLAGSを使って最適化する手法を紹介します。また、一般的な最適化の背景にある理論について述べます。
3より高い-Oレベルはどう?
何人かのユーザーが、-O4や-O9などを使うことによってもっといいパフォーマンスを得たと誇張していますが、3より高い-Oレベルは何の効果もありません。コンパイラは-O4のようなCFLAGSも許容するでしょうが、それらは実質何もしないのです。-O3の最適化を行うだけで、それ以上の最適化はしません。
さらに証拠が必要ですか?ソースコードを試してみてください。
https://gcc.gnu.org/viewcvs/gcc/trunk/gcc/opts.c?view=markup
CODE -O ソースコード
if (optimize >= 3)
{
flag_inline_functions = 1;
flag_unswitch_loops = 1;
flag_gcse_after_reload = 1;
/* Allow even more virtual operators. */
set_param_value ("max-aliased-vops", 1000);
set_param_value ("avg-aliased-vops", 3);
}
見てのとおり、3より高いレベルであっても、結局-O3として扱われます。
Skylake Xeon GCC Compiler Optimization Tests
-O0
-O1
-O2
-O2 -march=native
-O3
-O3 -march=native
-Ofast -march=native
Tags: [Raspberry Pi], [電子工作], [ディープラーニング]
●関連するコンテンツ(この記事を読んだ人は、次の記事も読んでいます)
NVIDIA Jetson Nano 開発者キットを買ってみた。メモリ容量 4GB LPDDR4 RAM
Jetson Nanoで TensorFlow PyTorch Caffe/Caffe2 Keras MXNet等を GPUパワーで超高速で動かす!
Raspberry Piでメモリを馬鹿食いするアプリ用に不要なサービスを停止してフリーメモリを増やす方法
ラズパイでメモリを沢山使用するビルドやアプリ用に不要なサービス等を停止して使えるメインメモリを増やす
【成功版】Raspberry Piで NNPACK対応版の Darknet Neural Network Frameworkをビルドする方法
ラズパイに Darknet NNPACK darknet-nnpackをソースからビルドして物体検出を行なう方法
【成功版】Raspberry Piで Darknet Neural Network Frameworkをビルドする方法
ラズパイに Darknet Neural Network Frameworkを入れて物体検出や悪夢のグロ画像を生成する
【成功版】Raspberry Piに TensorFlow Deep Learning Frameworkをインストールする方法
ラズパイに TensorFlow Deep Learning Frameworkを入れて Google DeepDreamで悪夢を見る方法
Raspberry Piで TensorFlow Deep Learning Frameworkを自己ビルドする方法
ラズパイで TensorFlow Deep Learning Frameworkを自己ビルドする方法
Raspberry Piで Caffe Deep Learning Frameworkで物体認識を行なってみるテスト
ラズパイで Caffe Deep Learning Frameworkを動かして物体認識を行なってみる
【ビルド版】Raspberry Piで DeepDreamを動かしてキモイ絵をモリモリ量産 Caffe Deep Learning Framework
ラズパイで Caffe Deep Learning Frameworkをビルドして Deep Dreamを動かしてキモイ絵を生成する
【インストール版】Raspberry Piで DeepDreamを動かしてキモイ絵をモリモリ量産 Caffe Deep Learning
ラズパイで Caffe Deep Learning Frameworkをインストールして Deep Dreamを動かしてキモイ絵を生成する
Raspberry Piで Caffe2 Deep Learning Frameworkをソースコードからビルドする方法
ラズパイで Caffe 2 Deep Learning Frameworkをソースコードから自己ビルドする方法
Orange Pi PC 2の 64bitのチカラで DeepDreamしてキモイ絵を高速でモリモリ量産してみるテスト
OrangePi PC2に Caffe Deep Learning Frameworkをビルドして Deep Dreamを動かしてキモイ絵を生成する
Raspberry Piに Jupyter Notebookをインストールして拡張子 ipynb形式の IPythonを動かす
ラズパイに IPython Notebookをインストールして Google DeepDream dream.ipynbを動かす
Raspberry Piで Deep Learningフレームワーク Chainerをインストールしてみる
ラズパイに Deep Learningのフレームワーク Chainerを入れてみた
Raspberry Piで DeepBeliefSDKをビルドして画像認識フレームワークを動かす方法
ラズパイに DeepBeliefSDKを入れて画像の物体認識を行なう
Raspberry Piで Microsoftの ELLをビルドする方法
ラズパイで Microsoftの ELL Embedded Learning Libraryをビルドしてみるテスト、ビルドするだけ
Raspberry Piで MXNet port of SSD Single Shot MultiBoxを動かして画像の物体検出をする方法
ラズパイで MXNet port of SSD Single Shot MultiBox Object Detectorで物体検出を行なってみる
Raspberry Piで Apache MXNet Incubatingをビルドする方法
ラズパイで Apache MXNet Incubatingをビルドしてみるテスト、ビルドするだけ
Raspberry Piで OpenCVの Haar Cascade Object Detectionでリアルタイムにカメラ映像の顔検出を行なってみる
ラズパイで OpenCVの Haar Cascade Object Detection Face & Eyeでリアルタイムでカメラ映像の顔検出をする方法
Raspberry Piで NNPACKをビルドする方法
ラズパイで NNPACKをビルドしてみるテスト、ビルドするだけ
Raspberry Pi 3の Linuxコンソール上で使用する各種コマンドまとめ
ラズパイの Raspbian OSのコマンドラインで使用する便利コマンド、負荷試験や CPUシリアル番号の確認方法等も
[HOME]
|
[BACK]
リンクフリー(連絡不要、ただしトップページ以外は Web構成の変更で移動する場合があります)
Copyright (c)
2018 FREE WING,Y.Sakamoto
Powered by 猫屋敷工房 & HTML Generator
http://www.neko.ne.jp/~freewing/raspberry_pi/raspberry_pi_update_darknet_nnpack_neural_network_framework/