|
|
|
|
| JetPack component | Sample locations on reference filesystem |
| TensorRT Samples | /usr/src/tensorrt/samples/ |
| cuDNN | /usr/src/cudnn_samples_v7/ |
| CUDA Samples | /usr/local/cuda-10.0/samples/ |
| Multimedia API L4T | /usr/src/tegra_multimedia_api/ *ディレクトリが無い |
| VisionWorks sample | /usr/share/visionworks/sources/samples/ /usr/share/visionworks-tracking/sources/samples/ /usr/share/visionworks-sfm/sources/samples/ |
| OpenCV sample | /usr/share/OpenCV/samples/ |
# NV Power Mode: MAXNで Jetson Nanoを本気モード(CPU 4コア)で動作させる sudo nvpmodel -m 0 sudo nvpmodel -q # Jetson Nanoを最高速(最大動作周波数)で動作させる sudo jetson_clocks # Jetson Nanoの現在の動作状態を表示する sudo jetson_clocks --show
# /usr/src/tensorrt/samples/ cd cp -a /usr/src/tensorrt/ ./ cd tensorrt/samples/ make -j4 ls -l ~/tensorrt/bin/
user@user-desktop:/usr/src/tensorrt/bin$ ./trtexec Mandatory params: --deploy=<file> Caffe deploy file OR --uff=<file> UFF file OR --onnx=<file> ONNX Model file Mandatory params for UFF: --uffInput=<name>,C,H,W Input blob name and its dimensions for UFF parser (can be specified multiple times) --output=<name> Output blob name (can be specified multiple times) Mandatory params for Caffe: --output=<name> Output blob name (can be specified multiple times) Optional params: --input=<name> Input blob name (can be specified multiple times) --model=<file> Caffe model file (default = no model, random weights used) --batch=N Set batch size (default = 1) --device=N Set cuda device to N (default = 0) --iterations=N Run N iterations (default = 10) --avgRuns=N Set avgRuns to N - perf is measured as an average of avgRuns (default=10) --percentile=P For each iteration, report the percentile time at P percentage (0<=P<=100, with 0 representing min, and 100 representing max; default = 99.0%) --workspace=N Set workspace size in megabytes (default = 16) --fp16 Run in fp16 mode (default = false). Permits 16-bit kernels --int8 Run in int8 mode (default = false). Currently no support for ONNX model. --verbose Use verbose logging (default = false) --engine=<file> Engine file to serialize to or deserialize from --calib=<file> Read INT8 calibration cache file. Currently no support for ONNX model. --useDLACore=N Specify a DLA engine for layers that support DLA. Value can range from 0 to n-1, where n is the number of DLA engines on the platform. --allowGPUFallback If --useDLACore flag is present and if a layer can't run on DLA, then run on GPU. --useSpinWait Actively wait for work completion. This option may decrease multi-process synchronization time at the cost of additional CPU usage. (default = false)
# /usr/src/cudnn_samples_v7/ cd cp -a /usr/src/cudnn_samples_v7/ ./ ls -l ~/cudnn_samples_v7/ drwxr-xr-x 3 user user 4096 5月 3 20:40 conv_sample drwxr-xr-x 4 user user 4096 3月 13 18:42 mnistCUDNN drwxr-xr-x 2 user user 4096 3月 13 18:42 RNN cd cudnn_samples_v7/conv_sample/ ./conv_sample Using format CUDNN_TENSOR_NCHW (for INT8x4 and INT8x32 tests use CUDNN_TENSOR_NCHW_VECT_C) Testing single precision ====USER DIMENSIONS==== input dims are 1, 32, 4, 4 filter dims are 32, 32, 1, 1 output dims are 1, 32, 4, 4 ====PADDING DIMENSIONS==== padded input dims are 1, 32, 4, 4 padded filter dims are 32, 32, 1, 1 padded output dims are 1, 32, 4, 4 Testing conv ^^^^ CUDA : elapsed = 0.000404119 sec, Test PASSED Testing half precision (math in single precision) ====USER DIMENSIONS==== input dims are 1, 32, 4, 4 filter dims are 32, 32, 1, 1 output dims are 1, 32, 4, 4 ====PADDING DIMENSIONS==== padded input dims are 1, 32, 4, 4 padded filter dims are 32, 32, 1, 1 padded output dims are 1, 32, 4, 4 Testing conv ^^^^ CUDA : elapsed = 0.000326872 sec, Test PASSED
# CUDA Samples # /usr/local/cuda-10.0/samples/ # /usr/local/cudaにシンボリックリンクが存在します cd cp -a /usr/local/cuda-10.0/samples/ ./ cd samples/ # サンプルを全部ビルドすると -j4で約 30分掛かります make -j4 # Finished building CUDA samples # bin/aarch64/linux/release にビルドしたバイナリが全て有ります cd bin/aarch64/linux/release ls -l ./matrixMul cd cd ~/samples/bin/aarch64/linux/release ls -l
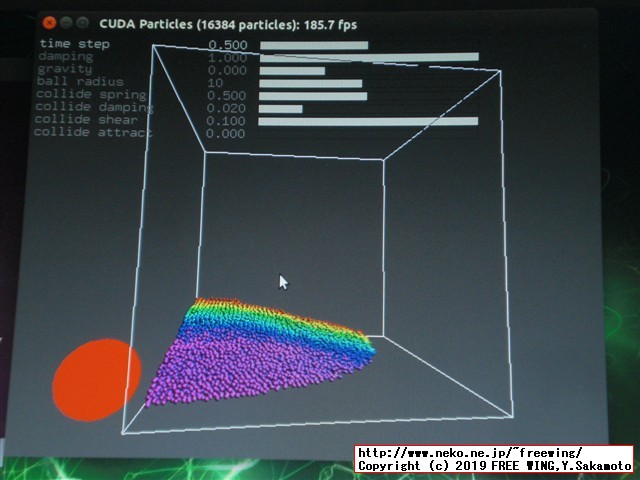
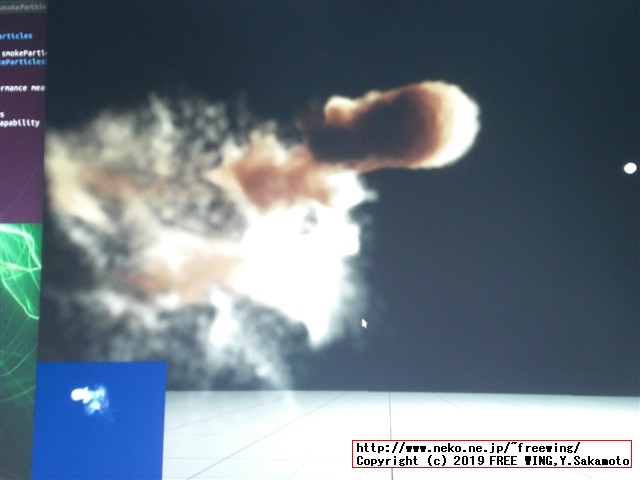
# 下記はピンポイントでビルドします cd ~/samples/5_Simulations/fluidsGL/ make cd ~/samples/5_Simulations/nbody/ make cd ~/samples/5_Simulations/oceanFFT/ make cd ~/samples/5_Simulations/particles/ make cd ~/samples/5_Simulations/smokeParticles/ make

| 計算する bodyの数 | Compute 5.3 CUDA device: [NVIDIA Tegra X1] | Simulation with CPU | CPUに対する実行効率 |
| 1024 bodies | 16.194 ms 0.648 billion 12.950 single-precision GFLOP/s | 1395.524 ms 0.008 billion 0.150 single-precision GFLOP/s | 86倍 |
| 4096 bodies | 89.346 ms 1.878 billion 37.556 single-precision GFLOP/s | 22469.846 ms 0.007 billion 0.149 single-precision GFLOP/s | 598倍 |
# Jetson Nanoを最高速(最大動作周波数)で動作させる sudo nvpmodel -m 0 sudo /usr/bin/jetson_clocks
user@user-desktop:~$ ls -l /usr/local/ lrwxrwxrwx 1 root root 9 3月 13 18:34 cuda -> cuda-10.0 drwxr-xr-x 12 root root 4096 3月 13 18:33 cuda-10.0 user@user-desktop:~$ ls -l /usr/local/cuda/samples/ total 104 drwxr-xr-x 39 root root 4096 3月 13 18:30 0_Simple drwxr-xr-x 7 root root 4096 3月 13 18:30 1_Utilities drwxr-xr-x 11 root root 4096 3月 13 18:30 2_Graphics drwxr-xr-x 22 root root 4096 3月 13 18:31 3_Imaging drwxr-xr-x 7 root root 4096 3月 13 18:31 4_Finance drwxr-xr-x 9 root root 4096 3月 13 18:30 5_Simulations drwxr-xr-x 29 root root 4096 3月 13 18:30 6_Advanced drwxr-xr-x 32 root root 4096 3月 13 18:30 7_CUDALibraries drwxr-xr-x 6 root root 4096 3月 13 18:31 common -rw-r--r-- 1 root root 64490 10月 16 2018 EULA.txt -rw-r--r-- 1 root root 2606 10月 16 2018 Makefile user@user-desktop:~$ cd user@user-desktop:~$ cp -a /usr/local/cuda-10.0/samples/ ~/ # サンプルを全部ビルドすると約 1時間掛かります user@user-desktop:~$ cd ~/samples/ user@user-desktop:~$ time make ... Finished building CUDA samples real 71m14.523s user 56m6.292s sys 5m36.176s
user@user-desktop:~$ cd
user@user-desktop:~$ cp -a /usr/local/cuda-10.0/samples/ ~/
# サンプルは単体でもビルドが可能
user@user-desktop:~$ cd ~/samples/5_Simulations/nbody/
user@user-desktop:~/samples/5_Simulations/nbody$ make
user@user-desktop:~/samples/5_Simulations/nbody$ ./nbody
Run "nbody -benchmark [-numbodies=<numBodies>]" to measure performance.
-fullscreen (run n-body simulation in fullscreen mode)
-fp64 (use double precision floating point values for simulation)
-hostmem (stores simulation data in host memory)
-benchmark (run benchmark to measure performance)
-numbodies=<N> (number of bodies (>= 1) to run in simulation)
-device=<d> (where d=0,1,2.... for the CUDA device to use)
-numdevices=<i> (where i=(number of CUDA devices > 0) to use for simulation)
-compare (compares simulation results running once on the default GPU and once on the CPU)
-cpu (run n-body simulation on the CPU)
-tipsy=<file.bin> (load a tipsy model file for simulation)
NOTE: The CUDA Samples are not meant for performance measurements. Results may vary when GPU Boost is enabled.
> Windowed mode
> Simulation data stored in video memory
> Single precision floating point simulation
> 1 Devices used for simulation
freeglut (./nbody): failed to open display ':0'
# nbody CUDA GPU 1024
user@user-desktop:~/samples/5_Simulations/nbody$ ./nbody -benchmark
Run "nbody -benchmark [-numbodies=<numBodies>]" to measure performance.
-fullscreen (run n-body simulation in fullscreen mode)
-fp64 (use double precision floating point values for simulation)
-hostmem (stores simulation data in host memory)
-benchmark (run benchmark to measure performance)
-numbodies=<N> (number of bodies (>= 1) to run in simulation)
-device=<d> (where d=0,1,2.... for the CUDA device to use)
-numdevices=<i> (where i=(number of CUDA devices > 0) to use for simulation)
-compare (compares simulation results running once on the default GPU and once on the CPU)
-cpu (run n-body simulation on the CPU)
-tipsy=<file.bin> (load a tipsy model file for simulation)
NOTE: The CUDA Samples are not meant for performance measurements. Results may vary when GPU Boost is enabled.
> Windowed mode
> Simulation data stored in video memory
> Single precision floating point simulation
> 1 Devices used for simulation
GPU Device 0: "NVIDIA Tegra X1" with compute capability 5.3
> Compute 5.3 CUDA device: [NVIDIA Tegra X1]
1024 bodies, total time for 10 iterations: 16.194 ms
= 0.648 billion interactions per second
= 12.950 single-precision GFLOP/s at 20 flops per interaction
# nbody CPU 4096
user@user-desktop:~/samples/5_Simulations/nbody$ ./nbody -benchmark -cpu
Run "nbody -benchmark [-numbodies=<numBodies>]" to measure performance.
-fullscreen (run n-body simulation in fullscreen mode)
-fp64 (use double precision floating point values for simulation)
-hostmem (stores simulation data in host memory)
-benchmark (run benchmark to measure performance)
-numbodies=<N> (number of bodies (>= 1) to run in simulation)
-device=<d> (where d=0,1,2.... for the CUDA device to use)
-numdevices=<i> (where i=(number of CUDA devices > 0) to use for simulation)
-compare (compares simulation results running once on the default GPU and once on the CPU)
-cpu (run n-body simulation on the CPU)
-tipsy=<file.bin> (load a tipsy model file for simulation)
NOTE: The CUDA Samples are not meant for performance measurements. Results may vary when GPU Boost is enabled.
> Windowed mode
> Simulation data stored in video memory
> Single precision floating point simulation
> 1 Devices used for simulation
> Simulation with CPU
4096 bodies, total time for 10 iterations: 22469.846 ms
= 0.007 billion interactions per second
= 0.149 single-precision GFLOP/s at 20 flops per interaction
# nbody CUDA GPU 4096
user@user-desktop:~/samples/5_Simulations/nbody$ ./nbody -benchmark -numbodies=4096
Run "nbody -benchmark [-numbodies=<numBodies>]" to measure performance.
-fullscreen (run n-body simulation in fullscreen mode)
-fp64 (use double precision floating point values for simulation)
-hostmem (stores simulation data in host memory)
-benchmark (run benchmark to measure performance)
-numbodies=<N> (number of bodies (>= 1) to run in simulation)
-device=<d> (where d=0,1,2.... for the CUDA device to use)
-numdevices=<i> (where i=(number of CUDA devices > 0) to use for simulation)
-compare (compares simulation results running once on the default GPU and once on the CPU)
-cpu (run n-body simulation on the CPU)
-tipsy=<file.bin> (load a tipsy model file for simulation)
NOTE: The CUDA Samples are not meant for performance measurements. Results may vary when GPU Boost is enabled.
> Windowed mode
> Simulation data stored in video memory
> Single precision floating point simulation
> 1 Devices used for simulation
GPU Device 0: "NVIDIA Tegra X1" with compute capability 5.3
> Compute 5.3 CUDA device: [NVIDIA Tegra X1]
number of bodies = 4096
4096 bodies, total time for 10 iterations: 89.346 ms
= 1.878 billion interactions per second
= 37.556 single-precision GFLOP/s at 20 flops per interaction
# nbody CPU 1024
user@user-desktop:~/samples/5_Simulations/nbody$ ./nbody -benchmark -numbodies=1024 -cpu
Run "nbody -benchmark [-numbodies=<numBodies>]" to measure performance.
-fullscreen (run n-body simulation in fullscreen mode)
-fp64 (use double precision floating point values for simulation)
-hostmem (stores simulation data in host memory)
-benchmark (run benchmark to measure performance)
-numbodies=<N> (number of bodies (>= 1) to run in simulation)
-device=<d> (where d=0,1,2.... for the CUDA device to use)
-numdevices=<i> (where i=(number of CUDA devices > 0) to use for simulation)
-compare (compares simulation results running once on the default GPU and once on the CPU)
-cpu (run n-body simulation on the CPU)
-tipsy=<file.bin> (load a tipsy model file for simulation)
NOTE: The CUDA Samples are not meant for performance measurements. Results may vary when GPU Boost is enabled.
> Windowed mode
> Simulation data stored in video memory
> Single precision floating point simulation
> 1 Devices used for simulation
> Simulation with CPU
number of bodies = 1024
1024 bodies, total time for 10 iterations: 1395.524 ms
= 0.008 billion interactions per second
= 0.150 single-precision GFLOP/s at 20 flops per interaction
user@user-desktop:~$ ls -l /usr/local/cuda/samples/ total 104 drwxr-xr-x 39 root root 4096 3月 13 18:30 0_Simple drwxr-xr-x 7 root root 4096 3月 13 18:30 1_Utilities drwxr-xr-x 11 root root 4096 3月 13 18:30 2_Graphics drwxr-xr-x 22 root root 4096 3月 13 18:31 3_Imaging drwxr-xr-x 7 root root 4096 3月 13 18:31 4_Finance drwxr-xr-x 9 root root 4096 3月 13 18:30 5_Simulations drwxr-xr-x 29 root root 4096 3月 13 18:30 6_Advanced drwxr-xr-x 32 root root 4096 3月 13 18:30 7_CUDALibraries drwxr-xr-x 6 root root 4096 3月 13 18:31 common -rw-r--r-- 1 root root 64490 10月 16 2018 EULA.txt -rw-r--r-- 1 root root 2606 10月 16 2018 Makefile user@user-desktop:~$ ls -l /usr/local/cuda/samples/* -rw-r--r-- 1 root root 64490 10月 16 2018 /usr/local/cuda/samples/EULA.txt -rw-r--r-- 1 root root 2606 10月 16 2018 /usr/local/cuda/samples/Makefile /usr/local/cuda/samples/0_Simple: total 148 drwxr-xr-x 2 root root 4096 3月 13 18:31 asyncAPI drwxr-xr-x 2 root root 4096 3月 13 18:31 cdpSimplePrint drwxr-xr-x 2 root root 4096 3月 13 18:31 cdpSimpleQuicksort drwxr-xr-x 2 root root 4096 3月 13 18:31 clock drwxr-xr-x 2 root root 4096 3月 13 18:31 cppIntegration drwxr-xr-x 2 root root 4096 3月 13 18:31 cppOverload drwxr-xr-x 2 root root 4096 3月 13 18:31 cudaOpenMP drwxr-xr-x 2 root root 4096 3月 13 18:31 fp16ScalarProduct drwxr-xr-x 2 root root 4096 3月 13 18:31 inlinePTX drwxr-xr-x 2 root root 4096 3月 13 18:31 matrixMul drwxr-xr-x 2 root root 4096 3月 13 18:31 matrixMulCUBLAS drwxr-xr-x 2 root root 4096 3月 13 18:31 matrixMulDrv drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleAssert drwxr-xr-x 3 root root 4096 3月 13 18:31 simpleAtomicIntrinsics drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleCallback drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleCooperativeGroups drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleCubemapTexture drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleCudaGraphs drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleLayeredTexture drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleMPI drwxr-xr-x 3 root root 4096 3月 13 18:31 simpleMultiCopy drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleMultiGPU drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleOccupancy drwxr-xr-x 2 root root 4096 3月 13 18:31 simplePitchLinearTexture drwxr-xr-x 2 root root 4096 3月 13 18:31 simplePrintf drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleSeparateCompilation drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleStreams drwxr-xr-x 3 root root 4096 3月 13 18:31 simpleSurfaceWrite drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleTemplates drwxr-xr-x 3 root root 4096 3月 13 18:31 simpleTexture drwxr-xr-x 3 root root 4096 3月 13 18:31 simpleTextureDrv drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleVoteIntrinsics drwxr-xr-x 3 root root 4096 3月 13 18:31 simpleZeroCopy drwxr-xr-x 3 root root 4096 3月 13 18:31 template drwxr-xr-x 2 root root 4096 3月 13 18:31 UnifiedMemoryStreams drwxr-xr-x 2 root root 4096 3月 13 18:31 vectorAdd drwxr-xr-x 2 root root 4096 3月 13 18:31 vectorAddDrv /usr/local/cuda/samples/1_Utilities: total 20 drwxr-xr-x 2 root root 4096 3月 13 18:31 bandwidthTest drwxr-xr-x 2 root root 4096 3月 13 18:31 deviceQuery drwxr-xr-x 2 root root 4096 3月 13 18:31 deviceQueryDrv drwxr-xr-x 2 root root 4096 3月 13 18:31 p2pBandwidthLatencyTest drwxr-xr-x 2 root root 4096 3月 13 18:31 UnifiedMemoryPerf /usr/local/cuda/samples/2_Graphics: total 36 drwxr-xr-x 4 root root 4096 3月 13 18:31 bindlessTexture drwxr-xr-x 4 root root 4096 3月 13 18:31 Mandelbrot drwxr-xr-x 4 root root 4096 3月 13 18:31 marchingCubes drwxr-xr-x 4 root root 4096 3月 13 18:31 simpleGL drwxr-xr-x 3 root root 4096 3月 13 18:31 simpleGLES drwxr-xr-x 3 root root 4096 3月 13 18:31 simpleGLES_EGLOutput drwxr-xr-x 4 root root 4096 3月 13 18:31 simpleTexture3D drwxr-xr-x 4 root root 4096 3月 13 18:31 volumeFiltering drwxr-xr-x 4 root root 4096 3月 13 18:31 volumeRender /usr/local/cuda/samples/3_Imaging: total 80 drwxr-xr-x 3 root root 4096 3月 13 18:31 bicubicTexture drwxr-xr-x 3 root root 4096 3月 13 18:31 bilateralFilter drwxr-xr-x 4 root root 4096 3月 13 18:31 boxFilter drwxr-xr-x 2 root root 4096 3月 13 18:31 convolutionFFT2D drwxr-xr-x 3 root root 4096 3月 13 18:31 convolutionSeparable drwxr-xr-x 3 root root 4096 3月 13 18:31 convolutionTexture drwxr-xr-x 4 root root 4096 3月 13 18:31 dct8x8 drwxr-xr-x 4 root root 4096 3月 13 18:31 dwtHaar1D drwxr-xr-x 4 root root 4096 3月 13 18:31 dxtc drwxr-xr-x 2 root root 4096 3月 13 18:31 EGLStream_CUDA_CrossGPU drwxr-xr-x 2 root root 4096 3月 13 18:31 EGLStreams_CUDA_Interop drwxr-xr-x 2 root root 4096 3月 13 18:31 EGLSync_CUDAEvent_Interop drwxr-xr-x 3 root root 4096 3月 13 18:31 histogram drwxr-xr-x 4 root root 4096 3月 13 18:31 HSOpticalFlow drwxr-xr-x 4 root root 4096 3月 13 18:31 imageDenoising drwxr-xr-x 4 root root 4096 3月 13 18:31 postProcessGL drwxr-xr-x 4 root root 4096 3月 13 18:31 recursiveGaussian drwxr-xr-x 3 root root 4096 3月 13 18:31 simpleCUDA2GL drwxr-xr-x 4 root root 4096 3月 13 18:31 SobelFilter drwxr-xr-x 3 root root 4096 3月 13 18:31 stereoDisparity /usr/local/cuda/samples/4_Finance: total 20 drwxr-xr-x 3 root root 4096 3月 13 18:31 binomialOptions drwxr-xr-x 3 root root 4096 3月 13 18:31 BlackScholes drwxr-xr-x 3 root root 4096 3月 13 18:31 MonteCarloMultiGPU drwxr-xr-x 2 root root 4096 3月 13 18:31 quasirandomGenerator drwxr-xr-x 2 root root 4096 3月 13 18:31 SobolQRNG /usr/local/cuda/samples/5_Simulations: total 28 drwxr-xr-x 4 root root 4096 3月 13 18:31 fluidsGL drwxr-xr-x 3 root root 4096 3月 13 18:31 fluidsGLES drwxr-xr-x 3 root root 4096 3月 13 18:31 nbody drwxr-xr-x 2 root root 4096 3月 13 18:31 nbody_opengles drwxr-xr-x 4 root root 4096 3月 13 18:31 oceanFFT drwxr-xr-x 4 root root 4096 3月 13 18:31 particles drwxr-xr-x 4 root root 4096 3月 13 18:31 smokeParticles /usr/local/cuda/samples/6_Advanced: total 108 drwxr-xr-x 3 root root 4096 3月 13 18:31 alignedTypes drwxr-xr-x 2 root root 4096 3月 13 18:31 cdpAdvancedQuicksort drwxr-xr-x 2 root root 4096 3月 13 18:31 cdpBezierTessellation drwxr-xr-x 2 root root 4096 3月 13 18:31 cdpQuadtree drwxr-xr-x 2 root root 4096 3月 13 18:31 concurrentKernels drwxr-xr-x 4 root root 4096 3月 13 18:31 eigenvalues drwxr-xr-x 3 root root 4096 3月 13 18:31 fastWalshTransform drwxr-xr-x 4 root root 4096 3月 13 18:31 FDTD3d drwxr-xr-x 3 root root 4096 3月 13 18:31 FunctionPointers drwxr-xr-x 3 root root 4096 3月 13 18:31 interval drwxr-xr-x 2 root root 4096 3月 13 18:31 lineOfSight drwxr-xr-x 3 root root 4096 3月 13 18:31 matrixMulDynlinkJIT drwxr-xr-x 2 root root 4096 3月 13 18:31 mergeSort drwxr-xr-x 2 root root 4096 3月 13 18:31 newdelete drwxr-xr-x 2 root root 4096 3月 13 18:31 ptxjit drwxr-xr-x 3 root root 4096 3月 13 18:31 radixSortThrust drwxr-xr-x 2 root root 4096 3月 13 18:31 reduction drwxr-xr-x 2 root root 4096 3月 13 18:31 scalarProd drwxr-xr-x 2 root root 4096 3月 13 18:31 scan drwxr-xr-x 3 root root 4096 3月 13 18:31 segmentationTreeThrust drwxr-xr-x 2 root root 4096 3月 13 18:31 shfl_scan drwxr-xr-x 3 root root 4096 3月 13 18:31 simpleHyperQ drwxr-xr-x 2 root root 4096 3月 13 18:31 sortingNetworks drwxr-xr-x 2 root root 4096 3月 13 18:31 threadFenceReduction drwxr-xr-x 2 root root 4096 3月 13 18:31 threadMigration drwxr-xr-x 3 root root 4096 3月 13 18:31 transpose drwxr-xr-x 2 root root 4096 3月 13 18:31 warpAggregatedAtomicsCG /usr/local/cuda/samples/7_CUDALibraries: total 120 drwxr-xr-x 2 root root 4096 3月 13 18:31 batchCUBLAS drwxr-xr-x 2 root root 4096 3月 13 18:31 BiCGStab drwxr-xr-x 2 root root 4096 3月 13 18:31 boundSegmentsNPP drwxr-xr-x 2 root root 4096 3月 13 18:31 boxFilterNPP drwxr-xr-x 2 root root 4096 3月 13 18:31 cannyEdgeDetectorNPP drwxr-xr-x 4 root root 4096 3月 13 18:30 common drwxr-xr-x 2 root root 4096 3月 13 18:31 conjugateGradient drwxr-xr-x 2 root root 4096 3月 13 18:31 conjugateGradientPrecond drwxr-xr-x 2 root root 4096 3月 13 18:31 conjugateGradientUM drwxr-xr-x 2 root root 4096 3月 13 18:31 cuSolverDn_LinearSolver drwxr-xr-x 2 root root 4096 3月 13 18:31 cuSolverRf drwxr-xr-x 2 root root 4096 3月 13 18:31 cuSolverSp_LinearSolver drwxr-xr-x 2 root root 4096 3月 13 18:31 cuSolverSp_LowlevelCholesky drwxr-xr-x 2 root root 4096 3月 13 18:31 cuSolverSp_LowlevelQR drwxr-xr-x 2 root root 4096 3月 13 18:31 FilterBorderControlNPP drwxr-xr-x 2 root root 4096 3月 13 18:31 freeImageInteropNPP drwxr-xr-x 2 root root 4096 3月 13 18:31 histEqualizationNPP drwxr-xr-x 2 root root 4096 3月 13 18:31 jpegNPP drwxr-xr-x 4 root root 4096 3月 13 18:31 MC_EstimatePiInlineP drwxr-xr-x 4 root root 4096 3月 13 18:31 MC_EstimatePiInlineQ drwxr-xr-x 4 root root 4096 3月 13 18:31 MC_EstimatePiP drwxr-xr-x 4 root root 4096 3月 13 18:31 MC_EstimatePiQ drwxr-xr-x 4 root root 4096 3月 13 18:31 MC_SingleAsianOptionP drwxr-xr-x 2 root root 4096 3月 13 18:31 MersenneTwisterGP11213 drwxr-xr-x 3 root root 4096 3月 13 18:31 randomFog drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleCUBLAS drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleCUBLASXT drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleCUFFT drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleCUFFT_2d_MGPU drwxr-xr-x 2 root root 4096 3月 13 18:31 simpleCUFFT_MGPU /usr/local/cuda/samples/common: total 24 drwxr-xr-x 2 root root 4096 3月 13 18:31 data -rw-r--r-- 1 root root 6509 10月 16 2018 findgllib.mk drwxr-xr-x 3 root root 4096 3月 13 18:31 inc drwxr-xr-x 3 root root 4096 3月 13 18:30 lib drwxr-xr-x 2 root root 4096 3月 13 18:31 src
cd /usr/share/visionworks/sources/install-samples.sh # Copying VisionWorks samples to /home/user/VisionWorks-1.6-Samples cd ~/VisionWorks-1.6-Samples make -j4 # bin/aarch64/linux/release にビルドしたバイナリが全て有ります cd bin/aarch64/linux/release ls -l ./nvx_demo_feature_tracker cd ~/VisionWorks-1.6-Samples/bin/aarch64/linux/release ls -l
For on-board camera, please use --source="device:///nvcamera?index=0" For usb camera, please use --source="device:///v4l2?index=1" # Logitech USB Camera cat /dev/v4l/by-id/* # cat: /dev/v4l/by-id/usb-046d_Logitech_Webcam_C930e_AD9E226E-video-index0 nvx_demo_feature_tracker --source="device:///v4l2?index=0"
VisionWorks officially supports following input format: ・Video ・Image ・Image sequence ・V4L2 camera ・NVIDIA camera
./nvx_demo_feature_tracker --source="/full_path/movie/sample.mp4" ./nvx_demo_feature_tracker --source="./relative_path/movie/sample.mp4"
# on-board camera ./nvx_demo_feature_tracker --source="device:///nvcamera?index=0"


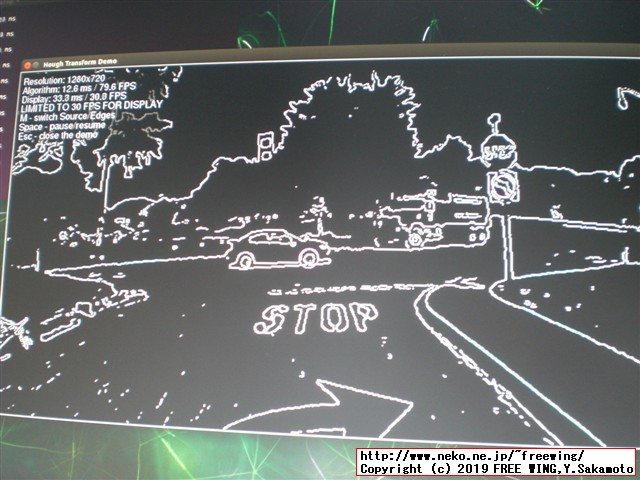
user@user-desktop:~/VisionWorks-1.6-Samples/bin/aarch64/linux/release$ ls -l total 13532 -rwxrwxr-x 1 user user 1359232 5月 3 21:18 nvx_demo_feature_tracker -rwxrwxr-x 1 user user 1313608 5月 3 21:18 nvx_demo_feature_tracker_nvxcu -rwxrwxr-x 1 user user 1357792 5月 3 21:18 nvx_demo_hough_transform -rwxrwxr-x 1 user user 1357552 5月 3 21:18 nvx_demo_motion_estimation -rwxrwxr-x 1 user user 1378296 5月 3 21:18 nvx_demo_stereo_matching -rwxrwxr-x 1 user user 1375232 5月 3 21:19 nvx_demo_video_stabilizer -rwxrwxr-x 1 user user 1305792 5月 3 21:19 nvx_sample_nvgstcamera_capture -rwxrwxr-x 1 user user 1432384 5月 3 21:19 nvx_sample_object_tracker_nvxcu -rwxrwxr-x 1 user user 1222984 5月 3 21:19 nvx_sample_opencv_npp_interop -rwxrwxr-x 1 user user 424928 5月 3 21:19 nvx_sample_opengl_interop -rwxrwxr-x 1 user user 1310888 5月 3 21:19 nvx_sample_player
# https://github.com/dusty-nv/jetson-inference/blob/master/docs/building-repo-2.md # Hello AI World - Building the Repo from Source sudo apt-get -y install git cmake # Cloning the Repo cd git clone https://github.com/dusty-nv/jetson-inference cd jetson-inference git submodule update --init # Configuring with CMake mkdir build cd build cmake ../ # [sudo] password for user: # Compiling the Project cd ~/jetson-inference/build make sudo make install
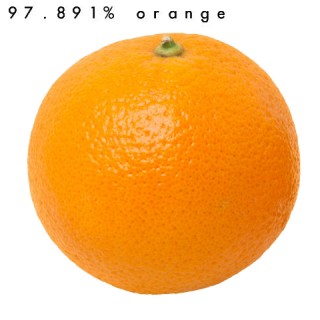
# Classifying Images with ImageNet cd ~/jetson-inference/build/aarch64/bin ./imagenet-console orange_0.jpg output_0.jpg ./imagenet-console granny_smith_1.jpg output_1.jpg ./imagenet-console cat_0.jpg output_2.jpg

cd ~/jetson-inference/build/aarch64/bin # to run using googlenet ./imagenet-camera googlenet # to run using alexnet ./imagenet-camera alexnet
# Detecting Objects from the Command Line ./detectnet-console dog_1.jpg output_1.jpg coco-dog # Running Other MS-COCO Models on Jetson ./detectnet-console bottle_0.jpg output_bot.jpg coco-bottle ./detectnet-console airplane_0.jpg output_air.jpg coco-airplane # Running Pedestrian Models on Jetson ./detectnet-console peds-001.jpg output-p1.jpg multiped ./detectnet-console peds-002.jpg output-p2.jpg multiped ./detectnet-console peds-003.jpg output-p3.jpg multiped ./detectnet-console peds-004.jpg output-p4.jpg multiped





cd ~/jetson-inference/build/aarch64/bin # run using facial recognition network ./detectnet-camera facenet # run using multi-class pedestrian/luggage detector ./detectnet-camera multiped # run using original single-class pedestrian detector ./detectnet-camera pednet # detect bottles/soda cans in the camera ./detectnet-camera coco-bottle # detect dogs in the camera ./detectnet-camera coco-dog # by default, program will run using multiped ./detectnet-camera
cd ~/jetson-inference/build/aarch64/bin # 画像セグメンテーション - SegNet ./segnet-batch.sh # ラズパイカメラ RaspiCamを使用して画像セグメンテーション。 ./segnet-camera # 任意の画像の場合 ./segnet-console input.jpg output.jpg ./segnet-console drone_0435.png doro_seg.jpg
cd ~/jetson-inference/build/aarch64/bin
./homography-console --model=coco --imageA=./peds-001.jpg --imageB=peds-002.jpg --imageOut=./hoge.jpg
./homography-console --model=coco --imageA=./drone_0427.png --imageB=drone_0435.png --imageOut=./doro1.jpg
./homography-console --model=coco --imageA=./drone_0427.png --imageB=drone_0436.png --imageOut=./doro2.jpg
./homography-camera --model=coco
homography-camera: failed to open camera for streaming
./homography-console
homography-console: two input image filenames required
USAGE:
homography-console --model=<name/path> --imageA=<path> --imageB=<path> --imageOut<path>
> --model is optional and can be path to ONNX model, 'coco', or 'webcam'
if --model is left unspecified, the default model is 'webcam'
> --imageOut is optional, and if specified will be imageA warped by the homography





cd ~/jetson-inference/build/aarch64/bin user@user-desktop:~/jetson-inference/build/aarch64/bin$ ls -l 実行ファイルのみ -rwxr-xr-x 1 root root 677392 5月 4 18:40 detectnet-camera -rwxr-xr-x 1 root root 675784 5月 4 18:40 detectnet-console -rwxr-xr-x 1 root root 675744 5月 4 18:40 gl-display-test -rwxr-xr-x 1 root root 676504 5月 4 18:40 gst-camera -rwxr-xr-x 1 root root 681144 5月 4 18:40 homography-camera -rwxr-xr-x 1 root root 671584 5月 4 18:40 homography-console -rwxr-xr-x 1 root root 681376 5月 4 18:40 imagenet-camera -rwxr-xr-x 1 root root 675544 5月 4 18:40 imagenet-console -rwxrwxr-x 1 user user 124 5月 4 16:35 segnet-batch.sh -rwxr-xr-x 1 root root 676808 5月 4 18:40 segnet-camera -rwxr-xr-x 1 root root 671056 5月 4 18:40 segnet-console -rwxr-xr-x 1 root root 675608 5月 4 18:40 superres-console -rwxr-xr-x 1 root root 709744 5月 4 18:40 trt-bench -rwxr-xr-x 1 root root 9128 5月 4 18:40 trt-console -rwxr-xr-x 1 root root 19304 5月 4 18:40 v4l2-console -rwxr-xr-x 1 root root 14168 5月 4 18:40 v4l2-display
user@user-desktop:~$ pkg-config opencv --modversion 3.3.1 user@user-desktop:~$ python -c "import cv2; print (cv2.__version__)" 3.3.1 user@user-desktop:~$ python3 -c "import cv2; print (cv2.__version__)" 3.3.1
user@user-desktop:~$ nvcc -V gives
nvcc: NVIDIA (R) Cuda compiler driver
Copyright (c) 2005-2018 NVIDIA Corporation
Built on Sun_Sep_30_21:09:22_CDT_2018
Cuda compilation tools, release 10.0, V10.0.166
user@user-desktop:~$ cd /usr/local/cuda/samples/1_Utilities/deviceQuery
user@user-desktop:/usr/local/cuda/samples/1_Utilities/deviceQuery$ sudo make
user@user-desktop:/usr/local/cuda/samples/1_Utilities/deviceQuery$ ./deviceQuery./
deviceQuery Starting...
CUDA Device Query (Runtime API) version (CUDART static linking)
Detected 1 CUDA Capable device(s)
Device 0: "NVIDIA Tegra X1"
CUDA Driver Version / Runtime Version 10.0 / 10.0
CUDA Capability Major/Minor version number: 5.3
Total amount of global memory: 3957 MBytes (4148756480 bytes)
( 1) Multiprocessors, (128) CUDA Cores/MP: 128 CUDA Cores
GPU Max Clock rate: 922 MHz (0.92 GHz)
Memory Clock rate: 13 Mhz
Memory Bus Width: 64-bit
L2 Cache Size: 262144 bytes
Maximum Texture Dimension Size (x,y,z) 1D=(65536), 2D=(65536, 65536), 3D=(4096, 4096, 4096)
Maximum Layered 1D Texture Size, (num) layers 1D=(16384), 2048 layers
Maximum Layered 2D Texture Size, (num) layers 2D=(16384, 16384), 2048 layers
Total amount of constant memory: 65536 bytes
Total amount of shared memory per block: 49152 bytes
Total number of registers available per block: 32768
Warp size: 32
Maximum number of threads per multiprocessor: 2048
Maximum number of threads per block: 1024
Max dimension size of a thread block (x,y,z): (1024, 1024, 64)
Max dimension size of a grid size (x,y,z): (2147483647, 65535, 65535)
Maximum memory pitch: 2147483647 bytes
Texture alignment: 512 bytes
Concurrent copy and kernel execution: Yes with 1 copy engine(s)
Run time limit on kernels: Yes
Integrated GPU sharing Host Memory: Yes
Support host page-locked memory mapping: Yes
Alignment requirement for Surfaces: Yes
Device has ECC support: Disabled
Device supports Unified Addressing (UVA): Yes
Device supports Compute Preemption: No
Supports Cooperative Kernel Launch: No
Supports MultiDevice Co-op Kernel Launch: No
Device PCI Domain ID / Bus ID / location ID: 0 / 0 / 0
Compute Mode:
< Default (multiple host threads can use ::cudaSetDevice() with device simultaneously) >
deviceQuery, CUDA Driver = CUDART, CUDA Driver Version = 10.0, CUDA Runtime Version = 10.0, NumDevs = 1
Result = PASS
# Python 2.7 wget https://nvidia.box.com/shared/static/m6vy0c7rs8t1alrt9dqf7yt1z587d1jk.whl -O torch-1.1.0a0+b457266-cp27-cp27mu-linux_aarch64.whl pip install torch-1.1.0a0+b457266-cp27-cp27mu-linux_aarch64.whl sudo apt -y install python-pip # Successfully installed torch-1.1.0a0+b457266 # Python 3.6 wget https://nvidia.box.com/shared/static/veo87trfaawj5pfwuqvhl6mzc5b55fbj.whl -O torch-1.1.0a0+b457266-cp36-cp36m-linux_aarch64.whl pip3 install numpy torch-1.1.0a0+b457266-cp36-cp36m-linux_aarch64.whl # Successfully installed numpy-1.16.3 torch-1.1.0a0+b457266
https://github.com/AastaNV/JEP/blob/master/script/install_opencv4.0.0_Nano.sh
# PyCuda and Numba is working on Jetson: NVIDIA Answer: Could you try if you can install pyCUDA with the steps shared in this comment?Is the memory management method of TX1 and TX2 different?
# PyCuda and Numba is working on Jetson: numba package (in python) on Jetson NVIDIA Answer: We don't have the experience on numba for Jetson.
For C++ app, you will need to recompile it with Nano architecture(sm=53).
# Step 0: Ensure that CUDA is installed and settings are correct echo $CUDA_HOME # /usr/local/cuda CUDA_ROOT=$CUDA_HOME echo $CUDA_ROOT # /usr/local/cuda # Don't forget to include the cuda library directories LD_LIBRARY_PATH echo $LD_LIBRARY_PATH # /usr/local/cuda/lib64: # Step 1: Install gcc4.4 (Ubuntu 11.04) sudo apt-get install build-essential gcc-4.3 g++-4.3 cd /usr/bin sudo ln -sf gcc-4.3 gcc # Step 2: Install Boost C++ libraries sudo apt-get -y install libboost-all-dev # Step 3: Install numpy sudo apt-get install python-numpy -y # Step 4: Download, unpack and install PyCUDA sudo apt-get install build-essential python-dev python-setuptools libboost-python-dev libboost-thread-dev -y # https://pypi.org/project/pycuda/ # pycuda-2019.1.tar.gz wget https://files.pythonhosted.org/packages/4d/29/5a3eb66c2f1a4adc681f6c8131e9ed677af31b0c8a78726d540bd44b3403/pycuda-2019.1.tar.gz tar xzvf pycuda-2019.1.tar.gz # Configure, make and install PyCUDA: cd pycuda-2019.1 rm ./siteconf.py ./configure.py --python-exe=/usr/bin/python3 --cuda-root=/usr/local/cuda --cudadrv-lib-dir=/usr/lib --boost-inc-dir=/usr/include --boost-lib-dir=/usr/lib --boost-python-libname=boost_python-mt-py32 --boost-thread-libname=boost_thread-mt --no-use-shipped-boost make cleam make -j 4 sudo python3 setup.py install
sudo apt-get install python3-pip libhdf5-serial-dev hdf5-tools pip3 install --extra-index-url https://developer.download.nvidia.com/compute/redist/jp/v42 tensorflow-gpu==1.13.1+nv19.4 --user
# Copy the ssd-mobilenet-v2 archive cd cd ~/Downloads/ wget --no-check-certificate 'https://nvidia.box.com/shared/static/8oqvmd79llr6lq1fr43s4fu1ph37v8nt.gz' -O ssd-mobilenet-v2.tar.gz tar -xvf ssd-mobilenet-v2.tar.gz cd cd ~/Downloads/ cd ssd-mobilenet-v2 sudo cp -R sampleUffSSD_rect /usr/src/tensorrt/samples sudo cp sample_unpruned_mobilenet_v2.uff /usr/src/tensorrt/data/ssd/ sudo cp image1.ppm /usr/src/tensorrt/data/ssd/ # Compile the sample cd /usr/src/tensorrt/samples/sampleUffSSD_rect sudo make # Run the sample to measure inference performance cd /usr/src/tensorrt/bin sudo ./sample_uff_ssd_rect
# SSD-Mobilenet-V2 user@user-desktop:/usr/src/tensorrt/bin$ sudo ./sample_uff_ssd_rect ../data/ssd/sample_unpruned_mobilenet_v2.uff Registering UFF model Registered Input Registered output NMS Creating engine Begin parsing model... End parsing model... Begin building engine... Time lapsed to create an engine: 189409ms End building engine... Created engine Num batches 1 Data Size 270000 *** deserializing 3 Binding Allocating buffer sizes for binding index: 0 of size : 270000 * 4 B Allocating buffer sizes for binding index: 1 of size : 700 * 4 B Allocating buffer sizes for binding index: 2 of size : 1 * 4 B Time taken for inference per run is 26.0485 ms. Time taken for inference per run is 26.078 ms. Time taken for inference per run is 26.0773 ms. Time taken for inference per run is 26.0772 ms. Time taken for inference per run is 26.0752 ms. Time taken for inference per run is 26.0736 ms. Time taken for inference per run is 26.0774 ms. Time taken for inference per run is 26.0761 ms. Time taken for inference per run is 26.0763 ms. Time taken for inference per run is 26.0763 ms. Average time spent per iteration is 26.0736 ms. Time taken for inference is 26.0763 ms. KeepCount 100
# Copy each of these .prototxt files # https://drive.google.com/open?id=1wbp6SBQA6PS0JrbK5bw_kHLXo23a0D7x # inception_v4.prototxt # pose_estimation.prototxt # ResNet50_224x224.prototxt # vgg19_N2.prototxt # sudo cp *.prototxt /usr/src/tensorrt/data/googlenet/ cd unzip prototxt_files-20190525T060337Z-001.zip cd prototxt_files sudo cp *.prototxt /usr/src/tensorrt/data/googlenet/
# ResNet-50 cd /usr/src/tensorrt/bin ./trtexec --output=prob --deploy=../data/googlenet/ResNet50_224x224.prototxt --fp16 --batch=1 # Inception V4 cd /usr/src/tensorrt/bin ./trtexec --output=prob --deploy=../data/googlenet/inception_v4.prototxt --fp16 --batch=1 # VGG-19 # Error: VGG19_N2.prototxt Engine could not be created # OK: vgg19_N2.prototxt cd /usr/src/tensorrt/bin ./trtexec --output=prob --deploy=../data/googlenet/vgg19_N2.prototxt --fp16 --batch=1
# ResNet-50 user@user-desktop:/usr/src/tensorrt/bin$ ./trtexec --output=prob --deploy=../data/googlenet/ResNet50_224x224.prototxt --fp16 --batch=1 output: prob deploy: ../data/googlenet/ResNet50_224x224.prototxt fp16 batch: 1 Input "data": 3x224x224 Output "prob": 1000x1x1 name=data, bindingIndex=0, buffers.size()=2 name=prob, bindingIndex=1, buffers.size()=2 Average over 10 runs is 26.8465 ms (host walltime is 26.9038 ms, 99% percentile time is 26.9317). Average over 10 runs is 26.8929 ms (host walltime is 26.9469 ms, 99% percentile time is 26.9891). Average over 10 runs is 26.8306 ms (host walltime is 26.8847 ms, 99% percentile time is 26.8992). Average over 10 runs is 26.878 ms (host walltime is 26.9403 ms, 99% percentile time is 26.9517). Average over 10 runs is 26.8572 ms (host walltime is 26.9188 ms, 99% percentile time is 26.9402). Average over 10 runs is 26.8464 ms (host walltime is 26.8997 ms, 99% percentile time is 26.9457). Average over 10 runs is 26.8331 ms (host walltime is 27.0572 ms, 99% percentile time is 26.9302). Average over 10 runs is 26.8625 ms (host walltime is 27.2524 ms, 99% percentile time is 26.9082). Average over 10 runs is 26.8953 ms (host walltime is 26.9532 ms, 99% percentile time is 26.979). Average over 10 runs is 26.8784 ms (host walltime is 26.9333 ms, 99% percentile time is 26.9331). # Inception V4 user@user-desktop:/usr/src/tensorrt/bin$ ./trtexec --output=prob --deploy=../data/googlenet/inception_v4.prototxt --fp16 --batch=1 output: prob deploy: ../data/googlenet/inception_v4.prototxt fp16 batch: 1 Input "data": 3x299x299 Output "prob": 1000x1x1 name=data, bindingIndex=0, buffers.size()=2 name=prob, bindingIndex=1, buffers.size()=2 Average over 10 runs is 93.6142 ms (host walltime is 93.6819 ms, 99% percentile time is 93.7973). Average over 10 runs is 93.5637 ms (host walltime is 93.6195 ms, 99% percentile time is 93.6502). Average over 10 runs is 93.6045 ms (host walltime is 93.6617 ms, 99% percentile time is 93.6984). Average over 10 runs is 93.605 ms (host walltime is 93.6575 ms, 99% percentile time is 93.6692). Average over 10 runs is 93.607 ms (host walltime is 93.6629 ms, 99% percentile time is 93.6988). Average over 10 runs is 93.5804 ms (host walltime is 93.6412 ms, 99% percentile time is 93.6714). Average over 10 runs is 93.5592 ms (host walltime is 93.628 ms, 99% percentile time is 93.6421). Average over 10 runs is 93.5413 ms (host walltime is 93.6079 ms, 99% percentile time is 93.6686). Average over 10 runs is 93.6059 ms (host walltime is 93.6678 ms, 99% percentile time is 93.6969). Average over 10 runs is 93.5855 ms (host walltime is 93.6489 ms, 99% percentile time is 93.6846). # VGG-19 user@user-desktop:/usr/src/tensorrt/bin$ ./trtexec --output=prob --deploy=../data/googlenet/vgg19_N2.prototxt --fp16 --batch=1 output: prob deploy: ../data/googlenet/vgg19_N2.prototxt fp16 batch: 1 Input "data": 3x224x224 Output "prob": 1000x1x1 name=data, bindingIndex=0, buffers.size()=2 name=prob, bindingIndex=1, buffers.size()=2 Average over 10 runs is 99.4974 ms (host walltime is 99.5659 ms, 99% percentile time is 102.033). Average over 10 runs is 99.6011 ms (host walltime is 99.6558 ms, 99% percentile time is 100.193). Average over 10 runs is 99.0806 ms (host walltime is 99.1366 ms, 99% percentile time is 100.239). Average over 10 runs is 99.3454 ms (host walltime is 99.4097 ms, 99% percentile time is 100.148). Average over 10 runs is 99.1329 ms (host walltime is 99.2009 ms, 99% percentile time is 99.9607). Average over 10 runs is 99.4592 ms (host walltime is 99.8207 ms, 99% percentile time is 100.201). Average over 10 runs is 99.4099 ms (host walltime is 99.4839 ms, 99% percentile time is 100.158). Average over 10 runs is 99.4908 ms (host walltime is 99.5542 ms, 99% percentile time is 100.186). Average over 10 runs is 99.2361 ms (host walltime is 99.2971 ms, 99% percentile time is 99.7917). Average over 10 runs is 99.2987 ms (host walltime is 99.3656 ms, 99% percentile time is 100.093).
# Copy the output_graph.uff model file # https://drive.google.com/drive/folders/1-eS14TKWACWEaOirSDeetLjIU0h8uOfv?usp=sharing # Unet_segmentation # output_graph.uff cd unzip Unet_segmentation-20190525T061648Z-001.zip mv Unet_segmentation/output_graph.uff . ls -l ~/output* # -rw-rw-r-- 1 user user 1971389 3月 15 21:19 /home/user/output_graph.uff # Run the U-Net inference benchmark: cd /usr/src/tensorrt/bin sudo ./trtexec --uff=~/output_graph.uff --uffInput=input_1,1,512,512 --output=conv2d_19/Sigmoid --fp16
user@user-desktop:/usr/src/tensorrt/bin$ sudo ./trtexec --uff=~/output_graph.uff --uffInput=input_1,1,512,512 --output=conv2d_19/Sigmoid --fp16 uff: ~/output_graph.uff uffInput: input_1,1,512,512 output: conv2d_19/Sigmoid fp16 UFFParser: Unsupported number of graph 0 Engine could not be created Engine could not be created
# Copy the pose_estimation.prototxt file # https://drive.google.com/drive/folders/1-eS14TKWACWEaOirSDeetLjIU0h8uOfv?usp=sharing # Unet_segmentation # pose_estimation.prototxt cd unzip Unet_segmentation-20190525T061648Z-001.zip sudo cp ./Unet_segmentation/pose_estimation.prototxt /usr/src/tensorrt/data/googlenet # Run the OpenPose inference benchmark: cd /usr/src/tensorrt/bin/ sudo ./trtexec --output=Mconv7_stage2_L2 --deploy=../data/googlenet/pose_estimation.prototxt --fp16 --batch=1
# Pose Estimation user@user-desktop:/usr/src/tensorrt/bin$ sudo ./trtexec --output=Mconv7_stage2_L2 --deploy=../data/googlenet/pose_estimation.prototxt --fp16 --batch=1 output: Mconv7_stage2_L2 deploy: ../data/googlenet/pose_estimation.prototxt fp16 batch: 1 Input "data": 3x256x456 Output "Mconv7_stage2_L2": 19x32x57 name=data, bindingIndex=0, buffers.size()=2 name=Mconv7_stage2_L2, bindingIndex=1, buffers.size()=2 Average over 10 runs is 68.7275 ms (host walltime is 68.7982 ms, 99% percentile time is 68.8601). Average over 10 runs is 68.7505 ms (host walltime is 68.8057 ms, 99% percentile time is 68.825). Average over 10 runs is 68.7546 ms (host walltime is 68.809 ms, 99% percentile time is 68.8314). Average over 10 runs is 68.747 ms (host walltime is 68.8016 ms, 99% percentile time is 68.8134). Average over 10 runs is 68.7875 ms (host walltime is 68.8522 ms, 99% percentile time is 68.8817). Average over 10 runs is 68.749 ms (host walltime is 68.8054 ms, 99% percentile time is 68.8383). Average over 10 runs is 68.7815 ms (host walltime is 68.836 ms, 99% percentile time is 68.8755). Average over 10 runs is 68.7628 ms (host walltime is 68.8161 ms, 99% percentile time is 68.8584). Average over 10 runs is 68.7647 ms (host walltime is 68.8174 ms, 99% percentile time is 68.8367). Average over 10 runs is 68.7718 ms (host walltime is 68.8338 ms, 99% percentile time is 68.8393).
# Download the require files to run inference on the Super Resolution neural network.
cd
sudo wget --no-check-certificate 'https://nvidia.box.com/shared/static/a99l8ttk21p3tubjbyhfn4gh37o45rn8.gz' -O Super-Resolution-BSD500.tar.gz
# Unzip the downloaded file
sudo tar -xvf Super-Resolution-BSD500.tar.gz
ONNX=`pwd`
echo $ONNX
# /home/user
ONNX=${ONNX}/Super-Resolution-BSD500/super_resolution_bsd500.onnx
echo $ONNX
# /home/user/Super-Resolution-BSD500/super_resolution_bsd500.onnx
# Run the Super Resolution inferencing benchmark:
cd /usr/src/tensorrt/bin
# sudo ./trtexec --output=output_0 --onnx=<path to the .onnx file in the unzipped folder above> --fp16 --batch=1
sudo ./trtexec --output=output_0 --onnx=${ONNX} --fp16 --batch=1
# Super Resolution
user@user-desktop:/usr/src/tensorrt/bin$ sudo ./trtexec --output=output_0 --onnx=${ONNX} --fp16 --batch=1
output: output_0
onnx: /home/user/Super-Resolution-BSD500/super_resolution_bsd500.onnx
fp16
batch: 1
----------------------------------------------------------------
Input filename: /home/user/Super-Resolution-BSD500/super_resolution_bsd500.onnx
ONNX IR version: 0.0.3
Opset version: 9
Producer name: pytorch
Producer version: 0.4
Domain:
Model version: 0
Doc string:
----------------------------------------------------------------
----- Parsing of ONNX model /home/user/Super-Resolution-BSD500/super_resolution_bsd500.onnx is Done ----
name=input_0, bindingIndex=0, buffers.size()=3
name=output_0, bindingIndex=1, buffers.size()=3
name=output_0, bindingIndex=1, buffers.size()=3
Average over 10 runs is 64.2781 ms (host walltime is 64.3409 ms, 99% percentile time is 64.4678).
Average over 10 runs is 64.0992 ms (host walltime is 64.7364 ms, 99% percentile time is 64.3531).
Average over 10 runs is 64.1281 ms (host walltime is 64.1892 ms, 99% percentile time is 64.3937).
Average over 10 runs is 64.2557 ms (host walltime is 65.1907 ms, 99% percentile time is 64.4817).
Average over 10 runs is 64.2128 ms (host walltime is 64.9405 ms, 99% percentile time is 64.422).
Average over 10 runs is 64.0247 ms (host walltime is 64.0869 ms, 99% percentile time is 64.0678).
Average over 10 runs is 64.2865 ms (host walltime is 64.71 ms, 99% percentile time is 64.4909).
Average over 10 runs is 64.0215 ms (host walltime is 64.089 ms, 99% percentile time is 64.1427).
Average over 10 runs is 64.2092 ms (host walltime is 64.2709 ms, 99% percentile time is 64.4807).
Average over 10 runs is 64.0827 ms (host walltime is 64.1327 ms, 99% percentile time is 64.2473).
# Install pre-requisite packages # Download trt-yolo-app cd ~ git clone https://github.com/NVIDIA-AI-IOT/deepstream_reference_apps.git # Install other requirements cd ~/deepstream_reference_apps/yolo sudo sh prebuild.sh # Compile and install app cd apps/trt-yolo mkdir build && cd build cmake -D CMAKE_BUILD_TYPE=Release .. make && sudo make install cd ../../.. # [ 23%] Building CXX object lib/CMakeFiles/yolo-lib.dir/ds_image.cpp.o # /home/user/deepstream_reference_apps/yolo/lib/ds_image.cpp: In constructor ‘DsImage::DsImage(const string&, const int&, const int&)’: # /home/user/deepstream_reference_apps/yolo/lib/ds_image.cpp:49:36: error: ‘CV_LOAD_IMAGE_COLOR’ was not declared in this scope # m_OrigImage = cv::imread(path, CV_LOAD_IMAGE_COLOR); # ^~~~~~~~~~~~~~~~~~~ # For the sample image data set # https://drive.google.com/drive/folders/1dJzDlQm8Pee0giSYorui_1e0N0bie65t?usp=sharing # Navigate your terminal to: cd ~/deepstream_reference_apps/yolo/data # Open the file “test_images.txt” # provide the full path to each of the 500 images you downloaded /home/<username>/Downloads/<image file name>.png Alternatively, you could provide the path to just one image and copy that line 500 times in that file. A sample set of images (5 images of varying resolutions, repeated 100 times) along with the test_images.txt file have been uploaded here. You can use this data set if you don’t want to download your own images. Go to the folder ‘config’ and open file ‘yolov3-tiny.txt' In the file yolov3-tiny.txt, search for “--precision=kINT8” and replace “kINT8” with “kHALF” to change the inference precision to FP16. Save the file # Now run the Tiny YOLO inference: cd ~/deepstream_reference_apps/yolo sudo trt-yolo-app --flagfile=config/yolov3-tiny.txt