|
|
|
|
| Debian | コードネーム | 年月 | 備考 | (参考)Ubuntuでの該当名称 |
| Debian 11 | Bullseye | 2021/08/14~ | 2021/11からラズパイにリリース | Focal Fossa 20.04 LTS ? |
| Debian 10 | Buster | 2019/06/20~ | 2019/06からラズパイ4対応 | Bionic 18.04 LTS |
| Debian 9 | Stretch | 2017/08/16~ | 2018/03からラズパイ3B+対応 | Xenial 16.04 LTS |
| Debian 8 | Jessie | 2015~ | 2016/02からラズパイ3対応 | Trusty 14.04 LTS |
| Debian 7 | Wheezy | 2013~2016 | ||
| Debian 6.0 | Squeeze | 2011~2014 | ||
| Debian GNU/Linux 5.0 | Lenny | 2009~2012 |



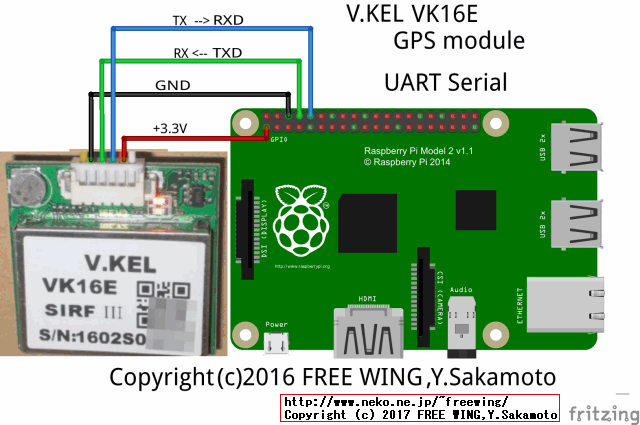
# cmdline.txtファイルをローカルにコピーする cp /boot/cmdline.txt . # sedコマンドで gpu_mem設定行を削除する sed -i -e "s/console=serial0,115200//" cmdline.txt # cmdline.txtファイルを /boot/にコピーする sudo cp cmdline.txt /boot/ # grepで設定値と設定内容を確認する。 cat /boot/cmdline.txt # enable_uart=1 # config.txtファイルをローカルにコピーする cp /boot/config.txt . # enable_uart設定行を追加する echo "" >> config.txt echo "# Enable UART" >> config.txt echo "enable_uart=1" >> config.txt # config.txtファイルを /boot/にコピーする sudo cp config.txt /boot/ # grepで設定値と設定内容を確認する。 cat /boot/config.txt | grep enable_uart # 再起動する sudo reboot
# uart_test.py
import pigpio
import time
pi = pigpio.pi()
if not pi.connected:
exit()
uart0 = pi.serial_open("/dev/ttyS0", 9600, 0)
# pi.serial_write(uart0, "Hello ! Serial !")
while True:
time.sleep(1)
rdy = pi.serial_data_available(uart0)
if rdy > 0:
(b, d) = pi.serial_read(uart0, rdy)
print(d)
pi.serial_close(uart0)
# 実行例 python uart_test.py $GPGGA,110003.155,,,,,0,00,,,M,0.0,M,,0000*54 $GPRMC,110003.155,V,,,,,,,060517,,,N*4A $GPVTG,,T,,M,,N,,K,N*2C
lqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqklqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqk x Time: n/a xxPRN: Elev: Azim: SNR: Used: x x Latitude: n/a xx 13 61 245 00 N x x Longitude: n/a xx 27 55 133 00 N x x Altitude: n/a xx 9 32 247 00 N x x Speed: n/a xx 11 39 063 00 N x x Heading: n/a xx 8 15 157 00 N x x Climb: n/a xx 23 32 212 00 N x x Status: NO FIX (4 secs) xx 28 21 014 00 N x x Longitude Err: n/a xx 19 25 142 29 N x x Latitude Err: n/a xx 17 15 222 21 N x x Altitude Err: n/a xx 20 02 020 00 N x x Course Err: n/a xx 4 -9 326 00 N x x Speed Err: n/a xx 29 -15 210 00 N x x Time offset: n/a xx x x Grid Square: n/a xx x mqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqjmqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqj
測位時(測定数値一部加工済み) lqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqklqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqk x Time: 2016-11-07T06:06:11.000Z xxPRN: Elev: Azim: SNR: Used: x x Latitude: 30.123454 N xx 7 13 284 33 Y x x Longitude: 130.123854 E xx 14 25 305 27 Y x x Altitude: -72.4 m xx 17 13 210 28 Y x x Speed: 0.0 kph xx 23 71 331 24 Y x x Heading: 0.0 deg (true) xx x x Climb: 0.0 m/min xx x x Status: 3D FIX (14 secs) xx x x Longitude Err: +/- 137 m xx x x Latitude Err: +/- 20 m xx x x Altitude Err: +/- 251 m xx x x Course Err: n/a xx x x Speed Err: +/- 993 kph xx x x Time offset: -1.643 xx x x Grid Square: PM95wr xx x mqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqjmqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqj
tcp://localhost:2947 SiRF>
lqqqqqqqqqqq X qqqqqq Y qqqqqq Z qqqqqqqqqq North qqqq East qqqqq Alt qqqqqqqqqk
xPos: 0 0 0 m 180.00000f 0.00000f -6378137 m x
xVel: 0.0 0.0 0.0 m/s -0.0 0.0 0.0 climb m/sx
xTime: 2006-11-04T11:29:37.760Z Leap: ?? Heading: 180.0f 0.0 speed m/sx
xFix: 0 = HDOP: 0.0 M1: 00 M2: 00x
mqqqqqqqqqqqqqqqqqqqqqqq Packet type 2 (0x02) qqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqj
l Measured Tracker qqqqqqqqqqkl Firmware Version qqqqqqqqqqqqqqqqqqqqqqqqqqqqqqk
xCh PRN Az El Stat C/N ? SFxx x
x 0 0 0 0 0000 0.0 xmqqqqqqq Packet Type 6 (0x06) qqqqqqqqqqqqqqqqqqqj
x 1 0 0 0 0000 0.0 xl CPU Throughput qqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqk
x 2 0 0 0 0000 0.0 xxMax: 158.270Lat: 139.012Time: 0.075 MS: 0 x
x 3 0 0 0 0000 0.0 xmqqqqqqq Packet type 9 (0x09) qqqqqqqqqqqqqqqqqqqj
x 4 0 0 0 0000 0.0 xl Clock Status qqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqk
x 5 0 0 0 0000 0.0 xxSVs: Drift: Bias: x
x 6 0 0 0 0000 0.0 xxEst. GPS Time: PPS offset: x
x 7 0 0 0 0000 0.0 xmqqqqqqq Packet type 7 (0x07) qqqqqqqqqqqqqqqqqqqj
x 8 0 0 0 0000 0.0 xl Visible List qqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqk
x 9 0 0 0 0000 0.0 xx x
x10 0 0 0 0000 0.0 xmqqqqqqq Packet type 13 (0x0D) qqqqqqqqqqqqqqqqqqj
x11 0 0 0 0000 0.0 xl DGPS Status qqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqk
mqqq Packet Type 4 (0x04) qqqjx SBAS = 1 2 3 4 5 6 7 8 9 10 11 12 x
mqqqqqqq Packet type 27 (0x1B) qqqqqqqqqqqqqqqqqqj
測位時(測定数値一部加工済み)
tcp://localhost:2947 SiRF>
lqqqqqqqqqqq X qqqqqq Y qqqqqq Z qqqqqqqqqq North qqqq East qqqqq Alt qqqqqqqqqk
xPos: -35.2147 3247933 3753176 m 30.12345f130.12385f -36 m x
xVel: 0.0 0.0 0.0 m/s 0.0 -0.0 0.0 climb m/sx
xTime: 2016-11-07T06:08:06.000Z Leap: ?? Heading: -0.0f 0.0 speed m/sx
xFix: 4 = 9 7 23 27 HDOP: 2.2 M1: 14 M2: 02x
mqqqqqqqqqqqqqqqqqqqqqqq Packet type 2 (0x02) qqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqj
l Measured Tracker qqqqqqqqqqkl Firmware Version qqqqqqqqqqqqqqqqqqqqqqqqqqqqqqk
xCh PRN Az El Stat C/N ? SFxx x
x 0 7 284 13 00bf 33.8 T xmqqqqqqq Packet Type 6 (0x06) qqqqqqqqqqqqqqqqqqqj
x 1 14 305 25 00ad 24.4 xl CPU Throughput qqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqk
x 2 0 0 0 0000 0.0 xxMax: 162.147Lat: 134.327Time: 0.075 MS: 0 x
x 3 17 210 12 00bf 31.1 T xmqqqqqqq Packet type 9 (0x09) qqqqqqqqqqqqqqqqqqqj
x 4 0 0 0 0000 0.0 xl Clock Status qqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqk
x 5 0 0 0 0000 0.0 xxSVs: Drift: Bias: x
x 6 0 0 0 0000 0.0 xxEst. GPS Time: PPS offset: x
x 7 23 332 71 00ad 19.9 xmqqqqqqq Packet type 7 (0x07) qqqqqqqqqqqqqqqqqqqj
x 8 0 0 0 0000 0.0 xl Visible List qqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqk
x 9 0 0 0 0000 0.0 xx12 = 27 16 8 26 7 21 11 9 23 18 10 31 x
x10 0 0 0 0000 0.0 xmqqqqqqq Packet type 13 (0x0D) qqqqqqqqqqqqqqqqqqj
x11 0 0 0 0000 0.0 xl DGPS Status qqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqk
mqqq Packet Type 4 (0x04) qqqjx SBAS = 1 2 3 4 5 6 7 8 9 10 11 12 x
mqqqqqqq Packet type 27 (0x1B) qqqqqqqqqqqqqqqqqqj
GPS reading ---------------------------------------- latitude nan longitude nan time utc 2026-06-20T11:36:27.360Z + 1781955387.36 altitude (m) nan eps nan epx nan epv nan ept 0.005 speed (m/s) nan climb nan track nan mode 1 sats []
測位時(測定数値一部加工済み) GPS reading ---------------------------------------- latitude 30.123454179 longitude 130.123851654 time utc 2016-11-07T06:10:23.000Z + 1494137423.0 altitude (m) -46.509 eps 277.8 epx 157.35 epv 221.431 ept 0.005 speed (m/s) 0.0 climb 0.0 track 0.0 mode 3
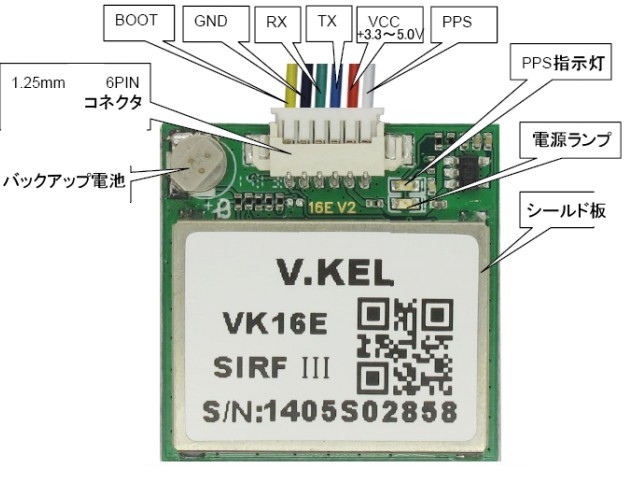
 HiLetgo NEO6M GPS U-blox NEO-6M V2フライト・コントロールGPSモジュール EPROM MWC APM2.5アンテナと付属 ASIN: B01HTC52ZO PPS出力無し |
 HiLetgo NEO6M U-blox MV2 Flight コントローラー NEO-6M APM 2.5 GPSモジュール For Arduino EEPROM ASIN: B01D1D0F5M PPS出力無し |
 ビット・トレード・ワン Raspberry Pi用GPS拡張ボード ADRPM1702P「組立済み」 ASIN: B01MSADQ7Y 2017年2月15日発売のラズパイマガジン(日経BP社) |
秋月電子通商 GPS受信機キット 1PPS出力付き 「みちびき」対応 [AE-GYSFDMAXB] 通販コード K-09991 |