CMU-Perceptual-Computing-Lab/openpose
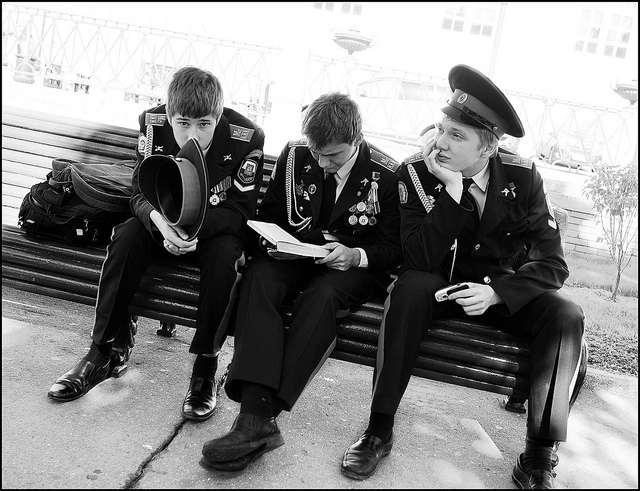
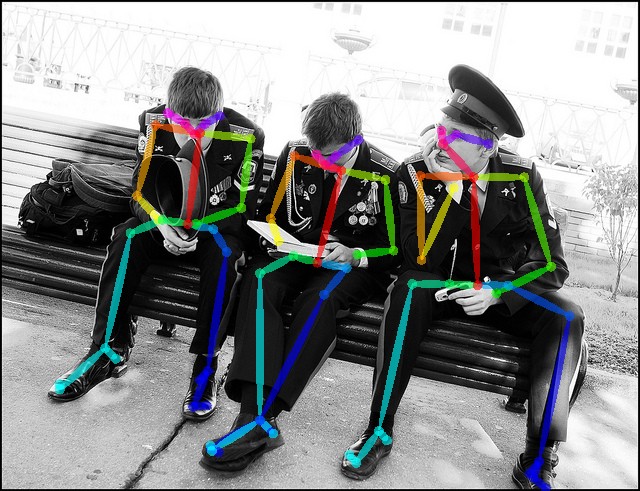
OpenPose represents the first real-time multi-person system to jointly detect human body, hand, facial, and foot keypoints (in total 135 keypoints) on single images.
ラズパイでは不可能だった OpenPoseを NVIDIA Jetson Nanoで動かします。
OpenPoseを動かすのに必要なリソース
・CUDA (Nvidia GPU) version
・GPU memory 1.6 GB
・空きメモリ 2.5 GB BODY_25 model
・空きメモリ 2.0 GB COCO model
・リソースの低減策 MPI and MPI_4 modelsを使用する
・--net_resolutionや scale_numberを使用して使用メモリを制限する
●今回動かした NVIDIA Jetson Nanoの Ubuntu OSのバージョン
user@user-desktop:~$ uname -a
Linux user-desktop 4.9.140-tegra #1 SMP PREEMPT Wed Mar 13 00:32:22 PDT 2019 aarch64 aarch64 aarch64 GNU/Linux
# CMake v3.17.3のビルド
# OpenPoseのビルドには最新の cmakeが必要なので cmakeをビルドする
# 上の記事を参照
# お決まりの sudo apt-get updateで最新状態に更新する
sudo apt-get update
# cmakeは入れない事!
sudo apt-get -y install git
# user@user-desktop:~$ cmake --version
# cmake version 3.10.2
# apt-get installの cmakeのバージョンは OpenPoseのビルドでエラーが出る
# CMake Error: The following variables are used in this project, but they are set to NOTFOUND.
# 動画を mp4形式で書き出す場合に FFmpegが必要
sudo apt-get -y install ffmpeg
# cmakeのバージョン確認
cmake --version
# cmake version 3.17.3
# CMake suite maintained and supported by Kitware (kitware.com/cmake).
# OpenPoseのビルド
# OpenPoseのソースリストをダウンロードする
cd
git clone https://github.com/CMU-Perceptual-Computing-Lab/openpose
cd
cd openpose
sudo bash ./scripts/ubuntu/install_deps.sh
mkdir build
cd build
cmake ..
make clean
# 4コアでビルドで時間短縮(30分)
time make -j4
# [100%] Linking CXX shared library libopenpose_wrapper.so
# [100%] Built target openpose_wrapper
# Built target openpose_lib
# real 29m30.898s
# user 85m27.724s
# sys 5m29.784s
sudo make install
● NVIDIA Jetson Nanoで OpenPoseを最適化して高速化する方法
NVIDIA環境用に OpenPoseを最適化して高速化する方法。
OpenPoseの Optional Settingsの所に書いて有る下記の項目。
・COCO and MPI Modelsを使用する
通常の設定ではダウンロードしないので、下記の設定を行なう必要が有る。
user@user-desktop:~/openpose$ ./build/examples/openpose/openpose.bin -help
openpose.bin: Warning: SetUsageMessage() never called
Flags from /build/gflags-npgYqN/gflags-2.2.1/src/gflags.cc:
-flagfile (load flags from file) type: string default: ""
-fromenv (set flags from the environment [use 'export FLAGS_flag1=value'])
type: string default: ""
-tryfromenv (set flags from the environment if present) type: string
default: ""
-undefok (comma-separated list of flag names that it is okay to specify on
the command line even if the program does not define a flag with that
name. IMPORTANT: flags in this list that have arguments MUST use the
flag=value format) type: string default: ""
Flags from /build/gflags-npgYqN/gflags-2.2.1/src/gflags_completions.cc:
-tab_completion_columns (Number of columns to use in output for tab
completion) type: int32 default: 80
-tab_completion_word (If non-empty, HandleCommandLineCompletions() will
hijack the process and attempt to do bash-style command line flag
completion on this value.) type: string default: ""
Flags from /build/gflags-npgYqN/gflags-2.2.1/src/gflags_reporting.cc:
-help (show help on all flags [tip: all flags can have two dashes])
type: bool default: false currently: true
-helpfull (show help on all flags -- same as -help) type: bool
default: false
-helpmatch (show help on modules whose name contains the specified substr)
type: string default: ""
-helpon (show help on the modules named by this flag value) type: string
default: ""
-helppackage (show help on all modules in the main package) type: bool
default: false
-helpshort (show help on only the main module for this program) type: bool
default: false
-helpxml (produce an xml version of help) type: bool default: false
-version (show version and build info and exit) type: bool default: false
Flags from /home/user/openpose/include/openpose/flags.hpp:
-3d (Running OpenPose 3-D reconstruction demo: 1) Reading from a stereo
camera system. 2) Performing 3-D reconstruction from the multiple views.
3) Displaying 3-D reconstruction results. Note that it will only display
1 person. If multiple people is present, it will fail.) type: bool
default: false
-3d_min_views (Minimum number of views required to reconstruct each
keypoint. By default (-1), it will require max(2, min(4, #cameras-1))
cameras to see the keypoint in order to reconstruct it.) type: int32
default: -1
-3d_views (Complementary option for `--image_dir` or `--video`. OpenPose
will read as many images per iteration, allowing tasks such as stereo
camera processing (`--3d`). Note that `--camera_parameter_path` must be
set. OpenPose must find as many `xml` files in the parameter folder as
this number indicates.) type: int32 default: -1
-alpha_heatmap (Blending factor (range 0-1) between heatmap and original
frame. 1 will only show the heatmap, 0 will only show the frame. Only
valid for GPU rendering.) type: double default: 0.69999999999999996
-alpha_pose (Blending factor (range 0-1) for the body part rendering. 1
will show it completely, 0 will hide it. Only valid for GPU rendering.)
type: double default: 0.59999999999999998
-body (Select 0 to disable body keypoint detection (e.g., for faster but
less accurate face keypoint detection, custom hand detector, etc.), 1
(default) for body keypoint estimation, and 2 to disable its internal
body pose estimation network but still still run the greedy association
parsing algorithm) type: int32 default: 1
-caffemodel_path (The combination `--model_folder` + `--caffemodel_path`
represents the whole path to the caffemodel file. If empty, it will use
the default OpenPose CaffeModel file.) type: string default: ""
-camera (The camera index for cv::VideoCapture. Integer in the range [0,
9]. Select a negative number (by default), to auto-detect and open the
first available camera.) type: int32 default: -1
-camera_parameter_path (String with the folder where the camera parameters
are located. If there is only 1 XML file (for single video, webcam, or
images from the same camera), you must specify the whole XML file path
(ending in .xml).) type: string default: "models/cameraParameters/flir/"
-camera_resolution (Set the camera resolution (either `--camera` or
`--flir_camera`). `-1x-1` will use the default 1280x720 for `--camera`,
or the maximum flir camera resolution available for `--flir_camera`)
type: string default: "-1x-1"
-cli_verbose (If -1, it will be disabled (default). If it is a positive
integer number, it will print on the command line every `verbose` frames.
If number in the range (0,1), it will print the progress every `verbose`
times the total of frames.) type: double default: -1
-disable_blending (If enabled, it will render the results (keypoint
skeletons or heatmaps) on a black background, instead of being rendered
into the original image. Related: `part_to_show`, `alpha_pose`, and
`alpha_pose`.) type: bool default: false
-disable_multi_thread (It would slightly reduce the frame rate in order to
highly reduce the lag. Mainly useful for 1) Cases where it is needed a
low latency (e.g., webcam in real-time scenarios with low-range GPU
devices); and 2) Debugging OpenPose when it is crashing to locate the
error.) type: bool default: false
-display (Display mode: -1 for automatic selection; 0 for no display
(useful if there is no X server and/or to slightly speed up the
processing if visual output is not required); 2 for 2-D display; 3 for
3-D display (if `--3d` enabled); and 1 for both 2-D and 3-D display.)
type: int32 default: -1
-face (Enables face keypoint detection. It will share some parameters from
the body pose, e.g. `model_folder`. Note that this will considerable slow
down the performance and increse the required GPU memory. In addition,
the greater number of people on the image, the slower OpenPose will be.)
type: bool default: false
-face_alpha_heatmap (Analogous to `alpha_heatmap` but applied to face.)
type: double default: 0.69999999999999996
-face_alpha_pose (Analogous to `alpha_pose` but applied to face.)
type: double default: 0.59999999999999998
-face_detector (Kind of face rectangle detector. Select 0 (default) to
select OpenPose body detector (most accurate one and fastest one if body
is enabled), 1 to select OpenCV face detector (not implemented for
hands), 2 to indicate that it will be provided by the user, or 3 to also
apply hand tracking (only for hand). Hand tracking might improve hand
keypoint detection for webcam (if the frame rate is high enough, i.e., >7
FPS per GPU) and video. This is not person ID tracking, it simply looks
for hands in positions at which hands were located in previous frames,
but it does not guarantee the same person ID among frames.) type: int32
default: 0
-face_net_resolution (Multiples of 16 and squared. Analogous to
`net_resolution` but applied to the face keypoint detector. 320x320
usually works fine while giving a substantial speed up when multiple
faces on the image.) type: string default: "368x368"
-face_render (Analogous to `render_pose` but applied to the face. Extra
option: -1 to use the same configuration that `render_pose` is using.)
type: int32 default: -1
-face_render_threshold (Analogous to `render_threshold`, but applied to the
face keypoints.) type: double default: 0.40000000000000002
-flir_camera (Whether to use FLIR (Point-Grey) stereo camera.) type: bool
default: false
-flir_camera_index (Select -1 (default) to run on all detected flir cameras
at once. Otherwise, select the flir camera index to run, where 0
corresponds to the detected flir camera with the lowest serial number,
and `n` to the `n`-th lowest serial number camera.) type: int32
default: -1
-fps_max (Maximum processing frame rate. By default (-1), OpenPose will
process frames as fast as possible. Example usage: If OpenPose is
displaying images too quickly, this can reduce the speed so the user can
analyze better each frame from the GUI.) type: double default: -1
-frame_first (Start on desired frame number. Indexes are 0-based, i.e., the
first frame has index 0.) type: uint64 default: 0
-frame_flip (Flip/mirror each frame (e.g., for real time webcam
demonstrations).) type: bool default: false
-frame_last (Finish on desired frame number. Select -1 to disable. Indexes
are 0-based, e.g., if set to 10, it will process 11 frames (0-10).)
type: uint64 default: 18446744073709551615
-frame_rotate (Rotate each frame, 4 possible values: 0, 90, 180, 270.)
type: int32 default: 0
-frame_step (Step or gap between processed frames. E.g., `--frame_step 5`
would read and process frames 0, 5, 10, etc..) type: uint64 default: 1
-frame_undistort (If false (default), it will not undistort the image, if
true, it will undistortionate them based on the camera parameters found
in `camera_parameter_path`) type: bool default: false
-frames_repeat (Repeat frames when finished.) type: bool default: false
-fullscreen (Run in full-screen mode (press f during runtime to toggle).)
type: bool default: false
-hand (Enables hand keypoint detection. It will share some parameters from
the body pose, e.g. `model_folder`. Analogously to `--face`, it will also
slow down the performance, increase the required GPU memory and its speed
depends on the number of people.) type: bool default: false
-hand_alpha_heatmap (Analogous to `alpha_heatmap` but applied to hand.)
type: double default: 0.69999999999999996
-hand_alpha_pose (Analogous to `alpha_pose` but applied to hand.)
type: double default: 0.59999999999999998
-hand_detector (Kind of hand rectangle detector. Analogous to
`--face_detector`.) type: int32 default: 0
-hand_net_resolution (Multiples of 16 and squared. Analogous to
`net_resolution` but applied to the hand keypoint detector.) type: string
default: "368x368"
-hand_render (Analogous to `render_pose` but applied to the hand. Extra
option: -1 to use the same configuration that `render_pose` is using.)
type: int32 default: -1
-hand_render_threshold (Analogous to `render_threshold`, but applied to the
hand keypoints.) type: double default: 0.20000000000000001
-hand_scale_number (Analogous to `scale_number` but applied to the hand
keypoint detector. Our best results were found with `hand_scale_number` =
6 and `hand_scale_range` = 0.4.) type: int32 default: 1
-hand_scale_range (Analogous purpose than `scale_gap` but applied to the
hand keypoint detector. Total range between smallest and biggest scale.
The scales will be centered in ratio 1. E.g., if scaleRange = 0.4 and
scalesNumber = 2, then there will be 2 scales, 0.8 and 1.2.) type: double
default: 0.40000000000000002
-heatmaps_add_PAFs (Same functionality as `add_heatmaps_parts`, but adding
the PAFs.) type: bool default: false
-heatmaps_add_bkg (Same functionality as `add_heatmaps_parts`, but adding
the heatmap corresponding to background.) type: bool default: false
-heatmaps_add_parts (If true, it will fill op::Datum::poseHeatMaps array
with the body part heatmaps, and analogously face & hand heatmaps to
op::Datum::faceHeatMaps & op::Datum::handHeatMaps. If more than one
`add_heatmaps_X` flag is enabled, it will place then in sequential memory
order: body parts + bkg + PAFs. It will follow the order on
POSE_BODY_PART_MAPPING in `src/openpose/pose/poseParameters.cpp`. Program
speed will considerably decrease. Not required for OpenPose, enable it
only if you intend to explicitly use this information later.) type: bool
default: false
-heatmaps_scale (Set 0 to scale op::Datum::poseHeatMaps in the range
[-1,1], 1 for [0,1]; 2 for integer rounded [0,255]; and 3 for no
scaling.) type: int32 default: 2
-identification (Experimental, not available yet. Whether to enable people
identification across frames.) type: bool default: false
-ik_threads (Experimental, not available yet. Whether to enable inverse
kinematics (IK) from 3-D keypoints to obtain 3-D joint angles. By default
(0 threads), it is disabled. Increasing the number of threads will
increase the speed but also the global system latency.) type: int32
default: 0
-image_dir (Process a directory of images. Use `examples/media/` for our
default example folder with 20 images. Read all standard formats (jpg,
png, bmp, etc.).) type: string default: ""
-ip_camera (String with the IP camera URL. It supports protocols like RTSP
and HTTP.) type: string default: ""
-keypoint_scale (Scaling of the (x,y) coordinates of the final pose data
array, i.e., the scale of the (x,y) coordinates that will be saved with
the `write_json` & `write_keypoint` flags. Select `0` to scale it to the
original source resolution; `1`to scale it to the net output size (set
with `net_resolution`); `2` to scale it to the final output size (set
with `resolution`); `3` to scale it in the range [0,1], where (0,0) would
be the top-left corner of the image, and (1,1) the bottom-right one; and
4 for range [-1,1], where (-1,-1) would be the top-left corner of the
image, and (1,1) the bottom-right one. Non related with `scale_number`
and `scale_gap`.) type: int32 default: 0
-logging_level (The logging level. Integer in the range [0, 255]. 0 will
output any log() message, while 255 will not output any. Current OpenPose
library messages are in the range 0-4: 1 for low priority messages and 4
for important ones.) type: int32 default: 3
-maximize_positives (It reduces the thresholds to accept a person
candidate. It highly increases both false and true positives. I.e., it
maximizes average recall but could harm average precision.) type: bool
default: false
-model_folder (Folder path (absolute or relative) where the models (pose,
face, ...) are located.) type: string default: "models/"
-model_pose (Model to be used. E.g., `COCO` (18 keypoints), `MPI` (15
keypoints, ~10% faster), `MPI_4_layers` (15 keypoints, even faster but
less accurate).) type: string default: "BODY_25"
-net_resolution (Multiples of 16. If it is increased, the accuracy
potentially increases. If it is decreased, the speed increases. For
maximum speed-accuracy balance, it should keep the closest aspect ratio
possible to the images or videos to be processed. Using `-1` in any of
the dimensions, OP will choose the optimal aspect ratio depending on the
user's input value. E.g., the default `-1x368` is equivalent to `656x368`
in 16:9 resolutions, e.g., full HD (1980x1080) and HD (1280x720)
resolutions.) type: string default: "-1x368"
-no_gui_verbose (Do not write text on output images on GUI (e.g., number of
current frame and people). It does not affect the pose rendering.)
type: bool default: false
-num_gpu (The number of GPU devices to use. If negative, it will use all
the available GPUs in your machine.) type: int32 default: -1
-num_gpu_start (GPU device start number.) type: int32 default: 0
-number_people_max (This parameter will limit the maximum number of people
detected, by keeping the people with top scores. The score is based in
person area over the image, body part score, as well as joint score
(between each pair of connected body parts). Useful if you know the exact
number of people in the scene, so it can remove false positives (if all
the people have been detected. However, it might also include false
negatives by removing very small or highly occluded people. -1 will keep
them all.) type: int32 default: -1
-output_resolution (The image resolution (display and output). Use "-1x-1"
to force the program to use the input image resolution.) type: string
default: "-1x-1"
-part_candidates (Also enable `write_json` in order to save this
information. If true, it will fill the op::Datum::poseCandidates array
with the body part candidates. Candidates refer to all the detected body
parts, before being assembled into people. Note that the number of
candidates is equal or higher than the number of final body parts (i.e.,
after being assembled into people). The empty body parts are filled with
0s. Program speed will slightly decrease. Not required for OpenPose,
enable it only if you intend to explicitly use this information.)
type: bool default: false
-part_to_show (Prediction channel to visualize (default: 0). 0 for all the
body parts, 1-18 for each body part heat map, 19 for the background heat
map, 20 for all the body part heat maps together, 21 for all the PAFs,
22-40 for each body part pair PAF.) type: int32 default: 0
-process_real_time (Enable to keep the original source frame rate (e.g.,
for video). If the processing time is too long, it will skip frames. If
it is too fast, it will slow it down.) type: bool default: false
-profile_speed (If PROFILER_ENABLED was set in CMake or Makefile.config
files, OpenPose will show some runtime statistics at this frame number.)
type: int32 default: 1000
-prototxt_path (The combination `--model_folder` + `--prototxt_path`
represents the whole path to the prototxt file. If empty, it will use the
default OpenPose ProtoTxt file.) type: string default: ""
-render_pose (Set to 0 for no rendering, 1 for CPU rendering (slightly
faster), and 2 for GPU rendering (slower but greater functionality, e.g.,
`alpha_X` flags). If -1, it will pick CPU if CPU_ONLY is enabled, or GPU
if CUDA is enabled. If rendering is enabled, it will render both
`outputData` and `cvOutputData` with the original image and desired body
part to be shown (i.e., keypoints, heat maps or PAFs).) type: int32
default: -1
-render_threshold (Only estimated keypoints whose score confidences are
higher than this threshold will be rendered. Generally, a high threshold
(> 0.5) will only render very clear body parts; while small thresholds
(~0.1) will also output guessed and occluded keypoints, but also more
false positives (i.e., wrong detections).) type: double
default: 0.050000000000000003
-scale_gap (Scale gap between scales. No effect unless scale_number > 1.
Initial scale is always 1. If you want to change the initial scale, you
actually want to multiply the `net_resolution` by your desired initial
scale.) type: double default: 0.25
-scale_number (Number of scales to average.) type: int32 default: 1
-tracking (Experimental, not available yet. Whether to enable people
tracking across frames. The value indicates the number of frames where
tracking is run between each OpenPose keypoint detection. Select -1
(default) to disable it or 0 to run simultaneously OpenPose keypoint
detector and tracking for potentially higher accurary than only
OpenPose.) type: int32 default: -1
-udp_host (Experimental, not available yet. IP for UDP communication. E.g.,
`192.168.0.1`.) type: string default: ""
-udp_port (Experimental, not available yet. Port number for UDP
communication.) type: string default: "8051"
-upsampling_ratio (Upsampling ratio between the `net_resolution` and the
output net results. A value less or equal than 0 (default) will use the
network default value (recommended).) type: double default: 0
-video (Use a video file instead of the camera. Use
`examples/media/video.avi` for our default example video.) type: string
default: ""
-write_bvh (Experimental, not available yet. E.g.,
`~/Desktop/mocapResult.bvh`.) type: string default: ""
-write_coco_json (Full file path to write people pose data with JSON COCO
validation format. If foot, face, hands, etc. JSON is also desired
(`--write_coco_json_variants`), they are saved with different file name
suffix.) type: string default: ""
-write_coco_json_variant (Currently, this option is experimental and only
makes effect on car JSON generation. It selects the COCO variant for
cocoJsonSaver.) type: int32 default: 0
-write_coco_json_variants (Add 1 for body, add 2 for foot, 4 for face,
and/or 8 for hands. Use 0 to use all the possible candidates. E.g., 7
would mean body+foot+face COCO JSON.) type: int32 default: 1
-write_heatmaps (Directory to write body pose heatmaps in PNG format. At
least 1 `add_heatmaps_X` flag must be enabled.) type: string default: ""
-write_heatmaps_format (File extension and format for `write_heatmaps`,
analogous to `write_images_format`. For lossless compression, recommended
`png` for integer `heatmaps_scale` and `float` for floating values.)
type: string default: "png"
-write_images (Directory to write rendered frames in `write_images_format`
image format.) type: string default: ""
-write_images_format (File extension and format for `write_images`, e.g.,
png, jpg or bmp. Check the OpenCV function cv::imwrite for all compatible
extensions.) type: string default: "png"
-write_json (Directory to write OpenPose output in JSON format. It includes
body, hand, and face pose keypoints (2-D and 3-D), as well as pose
candidates (if `--part_candidates` enabled).) type: string default: ""
-write_keypoint ((Deprecated, use `write_json`) Directory to write the
people pose keypoint data. Set format with `write_keypoint_format`.)
type: string default: ""
-write_keypoint_format ((Deprecated, use `write_json`) File extension and
format for `write_keypoint`: json, xml, yaml & yml. Json not available
for OpenCV < 3.0, use `write_json` instead.) type: string default: "yml"
-write_video (Full file path to write rendered frames in motion JPEG video
format. It might fail if the final path does not finish in `.avi`. It
internally uses cv::VideoWriter. Flag `write_video_fps` controls FPS.
Alternatively, the video extension can be `.mp4`, resulting in a file
with a much smaller size and allowing `--write_video_with_audio`.
However, that would require: 1) Ubuntu or Mac system, 2) FFmpeg library
installed (`sudo apt-get install ffmpeg`), 3) the creation temporarily of
a folder with the same file path than the final video (without the
extension) to storage the intermediate frames that will later be used to
generate the final MP4 video.) type: string default: ""
-write_video_3d (Analogous to `--write_video`, but applied to the 3D
output.) type: string default: ""
-write_video_adam (Experimental, not available yet. Analogous to
`--write_video`, but applied to Adam model.) type: string default: ""
-write_video_fps (Frame rate for the recorded video. By default, it will
try to get the input frames producer frame rate (e.g., input video or
webcam frame rate). If the input frames producer does not have a set FPS
(e.g., image_dir or webcam if OpenCV not compiled with its support), set
this value accordingly (e.g., to the frame rate displayed by the OpenPose
GUI).) type: double default: -1
-write_video_with_audio (If the input is video and the output is so too, it
will save the video with audio. It requires the output video file path
finishing in `.mp4` format (see `write_video` for details).) type: bool
default: false
Flags from src/logging.cc:
-alsologtoemail (log messages go to these email addresses in addition to
logfiles) type: string default: ""
-alsologtostderr (log messages go to stderr in addition to logfiles)
type: bool default: false
-colorlogtostderr (color messages logged to stderr (if supported by
terminal)) type: bool default: false
-drop_log_memory (Drop in-memory buffers of log contents. Logs can grow
very quickly and they are rarely read before they need to be evicted from
memory. Instead, drop them from memory as soon as they are flushed to
disk.) type: bool default: true
-log_backtrace_at (Emit a backtrace when logging at file:linenum.)
type: string default: ""
-log_dir (If specified, logfiles are written into this directory instead of
the default logging directory.) type: string default: ""
-log_link (Put additional links to the log files in this directory)
type: string default: ""
-log_prefix (Prepend the log prefix to the start of each log line)
type: bool default: true
-logbuflevel (Buffer log messages logged at this level or lower (-1 means
don't buffer; 0 means buffer INFO only; ...)) type: int32 default: 0
-logbufsecs (Buffer log messages for at most this many seconds) type: int32
default: 30
-logemaillevel (Email log messages logged at this level or higher (0 means
email all; 3 means email FATAL only; ...)) type: int32 default: 999
-logfile_mode (Log file mode/permissions.) type: int32 default: 436
-logmailer (Mailer used to send logging email) type: string
default: "/bin/mail"
-logtostderr (log messages go to stderr instead of logfiles) type: bool
default: false
-max_log_size (approx. maximum log file size (in MB). A value of 0 will be
silently overridden to 1.) type: int32 default: 1800
-minloglevel (Messages logged at a lower level than this don't actually get
logged anywhere) type: int32 default: 0
-stderrthreshold (log messages at or above this level are copied to stderr
in addition to logfiles. This flag obsoletes --alsologtostderr.)
type: int32 default: 2
-stop_logging_if_full_disk (Stop attempting to log to disk if the disk is
full.) type: bool default: false
Flags from src/utilities.cc:
-symbolize_stacktrace (Symbolize the stack trace in the tombstone)
type: bool default: true
Flags from src/vlog_is_on.cc:
-v (Show all VLOG(m) messages for m <= this. Overridable by --vmodule.)
type: int32 default: 0
-vmodule (per-module verbose level. Argument is a comma-separated list of
<module name>=<log level>. <module name> is a glob pattern, matched
against the filename base (that is, name ignoring .cc/.h./-inl.h). <log
level> overrides any value given by --v.) type: string default: ""
● cmakeのバージョンが古い時に OpenPoseのビルドでエラーが出る
# user@user-desktop:~$ cmake --version
# cmake version 3.10.2
# この cmakeのバージョンは OpenPoseのビルドでエラーが出る
CMake Error: The following variables are used in this project, but they are set to NOTFOUND.
Please set them or make sure they are set and tested correctly in the CMake files:
CUDA_cublas_device_LIBRARY (ADVANCED)
linked by target "caffe" in directory /home/user/openpose/3rdparty/caffe/src/caffe
-- Configuring incomplete, errors occurred!
See also "/home/user/openpose/build/caffe/src/openpose_lib-build/CMakeFiles/CMakeOutput.log".
See also "/home/user/openpose/build/caffe/src/openpose_lib-build/CMakeFiles/CMakeError.log".
CMakeFiles/openpose_lib.dir/build.make:105: recipe for target 'caffe/src/openpose_lib-stamp/openpose_lib-configure' failed
make[2]: *** [caffe/src/openpose_lib-stamp/openpose_lib-configure] Error 1
CMakeFiles/Makefile2:67: recipe for target 'CMakeFiles/openpose_lib.dir/all' failed
make[1]: *** [CMakeFiles/openpose_lib.dir/all] Error 2
Makefile:83: recipe for target 'all' failed
make: *** [all] Error 2
user@user-desktop:~/openpose/build$ tail /home/user/openpose/build/caffe/src/openpose_lib-build/CMakeFiles/CMakeError.log
/usr/bin/ld: cannot find -lpthreads
collect2: error: ld returned 1 exit status
CMakeFiles/cmTC_0fc19.dir/build.make:97: recipe for target 'cmTC_0fc19' failed
make[4]: *** [cmTC_0fc19] Error 1
make[4]: Leaving directory '/home/user/openpose/build/caffe/src/openpose_lib-build/CMakeFiles/CMakeTmp'
Makefile:126: recipe for target 'cmTC_0fc19/fast' failed
make[3]: *** [cmTC_0fc19/fast] Error 2
make[3]: Leaving directory '/home/user/openpose/build/caffe/src/openpose_lib-build/CMakeFiles/CMakeTmp'
# Solution
最新の cmakeをビルドしてインストールする
cmake --version
# cmake version 3.14.20190515-g66efdb
# CMake suite maintained and supported by Kitware (kitware.com/cmake).
● NVIDIA Jetson Nanoで OpenPoseをビルドする全自動 bashスクリプト
NVIDIA Jetson Nano semi-auto build and execute OpenPose bash script
#!/bin/sh
# Jetson Nano Maximum Performance
sudo nvpmodel -m 0
sudo jetson_clocks
sudo apt update
sudo apt -y install git
sudo apt -y install ffmpeg
sudo apt -y remove cmake
# build Newest Cmake
sudo apt -y install libcurl4-openssl-dev
cd
wget https://github.com/Kitware/CMake/archive/v3.14.0.zip
unzip v3.14.0.zip
cd CMake-3.14.0
./bootstrap --system-curl
time make -j4
sudo make install
● build_openpose_2nd.sh
build_openpose_2nd.sh
#!/bin/sh
# cmake version 3.14.0
cmake --version
# Jetson Nano Maximum Performance
sudo nvpmodel -m 0
sudo jetson_clocks
# build OpenPose
cd
git clone https://github.com/CMU-Perceptual-Computing-Lab/openpose
cd openpose
sudo bash ./scripts/ubuntu/install_deps.sh
mkdir build
cd build
cmake ..
make clean
time make -j4
sudo make install
# execute sample
cd
cd openpose
echo execute sample Video --net_resolution 320x-1
./build/examples/openpose/openpose.bin --video examples/media/video.avi --display 0 --model_folder ./models --write_video output_video.mp4 --net_resolution 320x-1 -fps_max 15
ls -l output_video.mp4
echo execute sample Picture --net_resolution -1x240 (-1x256 = NG Killed)
./build/examples/openpose/openpose.bin -image_dir ./examples/media/ --display 0 --model_folder ./models --write_images ./output/ --net_resolution -1x240
ls -l ./output/
# How to use
# 1st initialize
# apt update and install nano
# .bashrc force_color_prompt
# add CUDA environment variable
# see above
# 2nd initialize
# disable Auto Update and Upgrade
# see above
# 1st script
nano build_openpose_1st.sh
chmod 755 build_openpose_1st.sh
sudo ./build_openpose_1st.sh
# reboot
sudo reboot
# 2nd script
nano build_openpose_2nd.sh
chmod 755 build_openpose_2nd.sh
sudo ./build_openpose_2nd.sh
# OK !!
E: Could not get lock /var/lib/dpkg/lock-frontend - open (11: Resource temporarily unavailable)
E: Unable to acquire the dpkg frontend lock (/var/lib/dpkg/lock-frontend), is another process using it?
# delete lock file
sudo rm /var/lib/apt/lists/lock
sudo rm /var/lib/dpkg/lock
sudo rm /var/lib/dpkg/lock-frontend
sudo rm /var/cache/apt/archives/lock
# disable Auto Update and Upgrade
治ってねーよ!!! 2019/10/20
[ 4%] Building NVCC (Device) object src/openpose/CMakeFiles/openpose.dir/pose/openpose_generated_renderPose.cu.o
/home/jetson/openpose/src/openpose/core/arrayCpuGpu.cpp:14:40: error: ‘TBlob’ is not a member of ‘caffe’
std::unique_ptr<caffe::TBlob<T>> upCaffeBlobT;
^~~~~
compilation terminated due to -Wfatal-errors.
src/openpose/core/CMakeFiles/openpose_core.dir/build.make:75: recipe for target 'src/openpose/core/CMakeFiles/openpose_core.dir/arrayCpuGpu.cpp.o' failed
make[2]: *** [src/openpose/core/CMakeFiles/openpose_core.dir/arrayCpuGpu.cpp.o] Error 1
CMakeFiles/Makefile2:352: recipe for target 'src/openpose/core/CMakeFiles/openpose_core.dir/all' failed
make[1]: *** [src/openpose/core/CMakeFiles/openpose_core.dir/all] Error 2
make[1]: *** Waiting for unfinished jobs....
---
[ 7%] Building CXX object src/openpose/CMakeFiles/openpose.dir/core/cvMatToOpInput.cpp.o
/home/jetson/openpose/src/openpose/core/arrayCpuGpu.cpp:14:40: error: ‘TBlob’ is not a member of ‘caffe’
std::unique_ptr<caffe::TBlob<T>> upCaffeBlobT;
Raspberry Pi Camera Module V2 ?
jetson@jetson:~/openpose$ ./build/examples/openpose/openpose.bin --model_folder ./models
Starting OpenPose demo...
Configuring OpenPose...
Starting thread(s)...
VIDEOIO ERROR: V4L2: Pixel format of incoming image is unsupported by OpenCV
OpenCV Error: Unspecified error (GStreamer: unable to start pipeline
) in cvCaptureFromCAM_GStreamer, file /home/nvidia/build_opencv/opencv/modules/videoio/src/cap_gstreamer.cpp, line 887
VIDEOIO(cvCreateCapture_GStreamer(CV_CAP_GSTREAMER_V4L2, reinterpret_cast<char *>(index))): raised OpenCV exception:
/home/nvidia/build_opencv/opencv/modules/videoio/src/cap_gstreamer.cpp:887: error: (-2) GStreamer: unable to start pipeline
in function cvCaptureFromCAM_GStreamer
Error:
No camera found.
Coming from:
- /home/jetson/openpose/src/openpose/producer/producer.cpp:createProducer():464
- /home/jetson/openpose/src/openpose/producer/producer.cpp:createProducer():475
- /home/jetson/openpose/include/openpose/wrapper/wrapperAuxiliary.hpp:configureThreadManager():1188
- /home/jetson/openpose/include/openpose/wrapper/wrapper.hpp:exec():424